近年、AI技術の進化は目覚ましく、私たちの生活や産業に大きな変革をもたらしています。特にロボット分野においては、AIによる自律的な行動能力の向上が期待されており、その最前線で注目される画期的な技術が誕生しました。
株式会社Forcesteed Roboticsが開発したモビリティAIコアエンジン「Forcesteed-ARIA(フォースティード アリア)」は、ロボットの移動行動をリアルタイムに生成する革新的な技術です。このAIエンジンは、従来のロボットが抱えていた「地図への依存」という課題を克服し、より柔軟で賢い自律移動を可能にします。
この記事では、Forcesteed-ARIAがどのような技術なのか、AI初心者の方にも分かりやすい言葉で詳しく解説していきます。ロボットが自らの目で周囲を認識し、瞬時に最適な動きを判断する未来が、もうそこまで来ているのです。
Forcesteed-ARIAとは? ロボットの「目」と「脳」になるAI
これまでの多くのロボットは、決められたルートを移動するために、周囲の環境を正確に把握する「SLAM(スラム)」という技術や、あらかじめ作られた高精度な地図に大きく依存していました。SLAMは、ロボットが動きながら自身の位置と周囲の地図を同時に作り出す技術で、自律移動には不可欠とされてきました。
しかし、この従来の方式にはいくつかの課題がありました。例えば、SLAMには高度なセンサーや複雑な計算能力が必要で、導入コストが高くなりがちです。また、周囲の環境が頻繁に変わる場合、その都度地図を更新する手間やコストがかかることも少なくありませんでした。このような制約が、ロボットの導入や活用を妨げる要因となることもありました。
Forcesteed-ARIAは、このような従来の常識を覆します。このAIエンジンは、ロボットに搭載されたカメラの画像だけを頼りに、まるで人間が目で見ながら歩くように、その場で最適な移動経路を考え出すことができるのです。この画期的な技術を「マップレスナビゲーション」と呼びます。
Forcesteed-ARIAは、ロボットの「目」であるカメラからの映像情報を受け取り、それを分析して「脳」のように移動経路を判断します。これは、近年研究が進む自動運転車向けの「Vision-Language-Action(VLA)型AI」という、画像(Vision)と言葉(Language)から行動(Action)を生成するAIの考え方を応用したものです。Forcesteed Roboticsは、このVLA型AIをロボット用途に適した軽量な構成に自社で試作し、基盤モデルと呼ばれる大規模なAIの初期モデルとして開発しました。今後、同社が開発するロボットプラットフォームへの応用を目指しています。
Forcesteed-ARIAの画期的な4つの特徴
Forcesteed-ARIAが、なぜこれほど画期的なのか、その具体的な特徴を詳しく見ていきましょう。
1. カメラ画像と指示プロンプトから数秒先の移動経路を生成
Forcesteed-ARIAは、ロボットが搭載しているカメラの映像をリアルタイムで分析します。その映像に加えて、「この通路を進んで」「あの障害物を避けて」といった簡単な指示(これを「プロンプト」と呼びます)をAIに与えることで、数秒先の未来の移動経路を瞬時に予測し、生成します。これは、まるで人間が「あそこへ行こう」と目的地を決め、周囲を見ながら足元や障害物を避けて歩くような感覚に近いと言えるでしょう。従来のロボットのように、事前に全てのルートを詳細にプログラムする必要がありません。AIが状況に応じて最適な判断を下すため、より柔軟な行動が可能になります。
2. SLAM・高精度地図に依存しないマップレスナビゲーション
Forcesteed-ARIAの最大の特徴の一つは、特定の地図情報に頼らない「マップレスナビゲーション」であることです。これは、ロボットが新しい環境に入っても、事前に高精度な地図を用意したり、複雑な設定をしたりする必要がないことを意味します。例えば、今までロボットを導入できなかったような、頻繁にレイアウトが変わる倉庫や、複雑な形状の工場、あるいは屋外の変動する環境などでも、ロボットが自律的に動き回ることが可能になります。導入コストや運用負担が大幅に軽減されるため、ロボット活用の幅が大きく広がると期待されています。
3. ローカル処理によるリアルタイム動作
このAIエンジンは、ロボット自身の内部(ローカル計算環境)で動作するように設計されています。インターネットを通じて外部の高性能なコンピューター(クラウド)に接続して計算を行う必要がないため、通信環境に左右されず、常にリアルタイムで移動行動を生成できます。これは、一瞬の判断が求められるロボットの自律移動において非常に重要な要素です。例えば、急に現れた人や障害物に対しても、瞬時に反応して回避行動をとることができ、安全性の向上にも繋がります。
4. 公開データセット・独自構築データセットによる基盤モデル構築
Forcesteed-ARIAの賢さは、大量のデータから学習することで培われています。一般的な公開されているデータ(公開データセット)だけでなく、Forcesteed Roboticsが独自に集めて作り上げたデータ(独自構築データセット)も活用しています。特に、ロボットが実際に走行した記録(走行ログ)を集めてデータセットを構築することで、より現実の環境に即した、賢い判断ができるAIを目指しています。これにより、さまざまな状況に対応できる汎用性の高いAIが実現するでしょう。

Forcesteed-ARIAが実現するロボット行動の可能性
Forcesteed-ARIAを搭載したロボットは、これまで以上に柔軟で高度な行動が可能になります。具体的にどのようなことができるようになるのでしょうか。
人や障害物を考慮した移動行動のプランニング
ロボットはカメラを通して周囲をリアルタイムで認識し、人や壁、荷物などの障害物を瞬時に検知します。そして、それらを避けながら安全に移動するための最適な経路を、その場で計画し実行します。混雑した場所や、人や物が頻繁に動くような環境でも、衝突することなくスムーズに動き回れるようになります。
目的を示すプロンプトに応じたパスを生成
例えば、「〇〇番の棚へ行って」という基本的な指示だけでなく、「通路の真ん中を通って」「角を曲がるときはゆっくり」といった、より詳細な指示(プロンプト)にも対応し、それに沿った経路を生成できます。これにより、ロボットはより人間の意図や状況に合わせた、きめ細やかな動きが可能になります。
通路や空間構造に沿ったナビゲーション
特別な地図がなくても、ロボットはカメラ映像から通路の形状や部屋の構造を理解し、それに沿って適切に移動できます。例えば、広い空間で方向を見失うことなく、自然に目的地へたどり着くことができるでしょう。これは、新しい施設や、一時的にレイアウトが変更された場所でも、ロボットがすぐに適応できることを意味します。
地図に依存しないマップレス移動
これは前述の通り、大きなメリットです。従来の地図ベースのシステムでは対応が難しかった、動的な環境や未知の環境でも、ロボットが自律的に行動できるようになります。これにより、ロボットの導入場所や活用シーンが飛躍的に広がります。
カメラ情報のみを用いたリアルタイム行動生成
高価なLiDAR(ライダー)のような特殊なセンサーを多数搭載することなく、カメラという比較的安価で普及しているセンサーだけで高度な自律移動を実現できるため、ロボット導入のハードルが下がります。これにより、より多くの企業や施設でロボットの活用が進むことが期待されます。
実環境でのPoC(概念実証)を開始
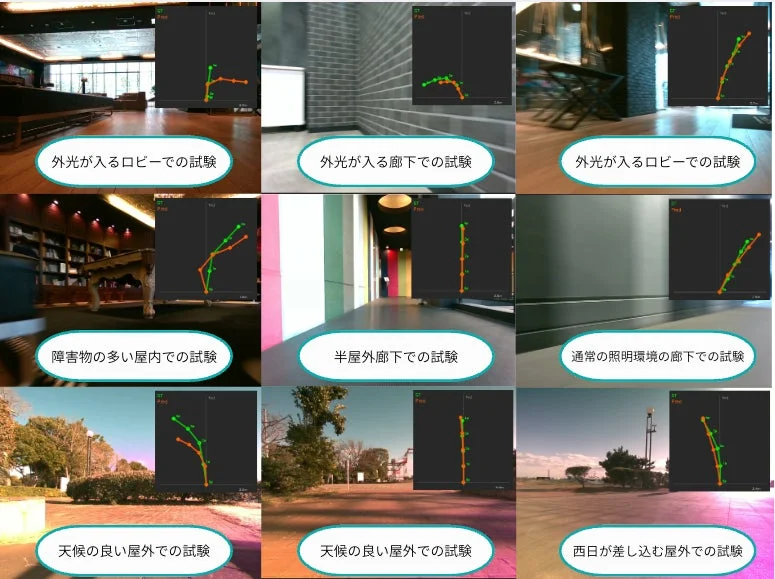
Forcesteed Roboticsは、Forcesteed-ARIAの実際の性能を確かめるため、すでに実環境でのPoC(概念実証)を開始しています。
このPoCでは、実際にロボットを走行させて得られた記録(走行ログ)をデータとして集め、独自のデータセットを構築しました。このデータセットを用いて、「ロボットが人や障害物を器用に回避しながら、通路に沿ってスムーズに移動する」といった、より実践的な経路生成の検証が行われています。これは、AIが現実世界でどれだけ有効に機能するかを評価し、さらなる改善に繋げていくための非常に重要なステップです。机上の理論だけでなく、実際の環境で動くことで、より実用的なAIへと進化していくことでしょう。
今後の展開とForcesteed Roboticsの描く未来
Forcesteed-ARIAは、まだ開発の初期段階ではありますが、その可能性は非常に大きいとされています。Forcesteed Roboticsは、この革新的な技術を、同社が開発を進めているロボットプラットフォーム「Guardian」への搭載を計画しています。これにより、「Guardian」はより賢く、自律的に動くことができるようになるでしょう。
また、Forcesteed-ARIAを他のロボットにも応用できる汎用的なモビリティAI基盤として発展させるため、以下の研究開発も積極的に進められています。
-
指示付き経路生成(命令ベース行動生成): より複雑な指示や命令に対して、ロボットが意図を正確に理解し、適切な経路を生成できるようになるための研究です。例えば、「緊急時に最短ルートで移動せよ」といった高度な指示にも対応できる可能性があります。
-
シミュレーション環境による大規模事前学習: 現実世界でのデータ収集には時間やコスト、安全性の問題など限界があるため、仮想的な環境(シミュレーション)で大量のデータを効率的に学習させることで、AIの性能を飛躍的に向上させることを目指します。これにより、多種多様な状況への対応能力を高めることができます。
-
異なる環境ドメインでの行動生成: 病院、工場、オフィス、屋外など、ロボットが活躍する場所は多岐にわたります。それぞれの環境が持つ特性をAIが理解し、場所を選ばずに問題なく行動できるよう、AIの適応能力を高める研究です。
-
実環境データによる継続学習: ロボットが実際に動く中で得られる新たなデータを継続的に学習させることで、AIが常に最新の状況に適応し、賢さをアップデートし続けられるようにします。これにより、使い続けるほど賢くなるロボットの実現が期待されます。
Forcesteed Roboticsは、「ロボットが環境を理解し、人間のように自然に行動できるモビリティ知能」の実現に向けて、今後も研究開発を継続していくとしています。その目標は、AIと画像認識、ロボティクス技術を組み合わせた「フィジカルAI」の分野で、社会に貢献することです。
株式会社Forcesteed Roboticsのウェブサイトはこちらです: https://www.forcesteed.com/
株式会社Forcesteed Roboticsについて
Forcesteed Roboticsは、AI、画像認識、ロボティクス技術を融合させ、現実世界で機能するAI(フィジカルAI)の研究開発と社会実装に取り組むスタートアップ企業です。現場でのロボット活用を重視し、AIによる認識・判断・制御を組み合わせたシステム構築や、AI学習に必要なデータ収集基盤の提供を通じて、研究開発から現場への導入までを一貫して支援しています。
-
会社名: 株式会社Forcesteed Robotics
-
所在地: 東京都江東区青海2丁目7番4号 The SOHO
-
設立: 2024年07月29日
-
代表取締役: 大澤弘幸、諸岡亜貴子
-
事業内容:
-
AI・画像認識・ロボティクス技術の研究開発および社会実装
-
Spingence社製「Edgestar」サーバの販売および技術支援
-
RealMan Robotics社の日本における戦略パートナー
-
ugo社製ロボットの販売代理店
-
まとめ
Forcesteed-ARIAの登場は、ロボットの自律移動技術における大きな一歩と言えるでしょう。従来の地図への依存という制約から解放され、より多くの場所でロボットが活躍できる未来が現実味を帯びてきました。AI初心者の方々にも、この革新的な技術の重要性が伝わったでしょうか。
カメラ画像とAIの力だけで、ロボットが賢く、安全に、そしてリアルタイムに動き回る。Forcesteed-ARIAは、そんなSFのような世界を私たちの目の前に広げようとしています。今後のForcesteed Roboticsのさらなる進化に期待が高まります。
