
ティアフォーがAIベース型自動運転レベル4を公開!日米欧連携で実現する未来のモビリティとは?
自動運転技術は、私たちの生活をより安全で便利なものに変える可能性を秘めています。その最前線で活躍する株式会社ティアフォーは、この度、データ中心のAIを活用した自動運転レベル4向けソフトウェアスタックを開発し、オープンソースソフトウェア「Autoware」を通じて公開しました。
この画期的な取り組みは、自動運転の適用範囲を広げ、自動車業界に新たな標準を確立することを目指しています。本記事では、AI初心者の方にも分かりやすい言葉で、ティアフォーが公開したAIベース型自動運転レベル4の技術、そして日米欧の3拠点での試験走行について詳しく解説していきます。
自動運転レベル4とは?AI初心者でもわかる基礎知識
自動運転技術には、その自律性の度合いによって「レベル0」から「レベル5」までの6段階が定められています。AI初心者の方にとっては、このレベル分けが少し難しく感じるかもしれませんので、簡単に解説しましょう。
-
レベル0: 運転の自動化なし。すべての操作をドライバーが行います。
-
レベル1: 運転支援。加速・減速・操舵のいずれかをシステムが支援します(例:アダプティブクルーズコントロール)。
-
レベル2: 部分自動運転。加速・減速・操舵のうち、複数の操作をシステムが同時に支援します(例:高速道路での車線維持支援)。ただし、常にドライバーが監視し、必要に応じて操作を引き継ぐ必要があります。
-
レベル3: 条件付自動運転。特定の条件下で、システムがすべての運転操作を行います。システムからの要請があった場合のみ、ドライバーが操作を引き継ぎます。
-
レベル4: 特定条件下における完全自動運転。特定の場所や時間といった「運行設計領域(ODD:Operational Design Domain)」内であれば、システムがすべての運転操作を行い、システムが対応できない状況でも安全に停止するなど、ドライバーの介入を必要としません。
-
レベル5: 完全自動運転。すべての場所、すべての状況でシステムが運転操作を行います。ドライバーは不要で、ハンドルやペダルがない車両も想定されます。
今回ティアフォーが公開したのは、この中の「レベル4」に対応するソフトウェアスタックです。これは、特定の条件下であれば、車両が自律的に周囲を認識し、判断し、安全に走行できることを意味します。ドライバーは運転から解放され、車内で他の活動に集中できるようになるため、モビリティのあり方を大きく変える可能性を秘めています。
データ中心AIが実現する「自動運転レベル4+」の進化
ティアフォーは、「自動運転の民主化」というビジョンを掲げ、オープンソースソフトウェア「Autoware」の開発を主導しています。今回公開された自動運転レベル4向けソフトウェアスタックは、この「Autoware」のリポジトリを通じて提供されています。これにより、世界中の開発者や企業がこの最先端技術にアクセスし、共同で改善を進めることが可能になります。
ティアフォーが提唱する「自動運転レベル4+」とは、特定条件下での自動運転レベル4を起点とし、実運用から得られる走行データを活用してAIモデルを継続的に改善し、自動運転が可能なユースケース(適用範囲)を段階的に拡張していくという考え方です。この概念を支えるのが、今回公開された「データ中心のAI技術」です。
データ中心のAIとは、単にAIモデルの性能を向上させるだけでなく、AIが学習する「データ」そのものの質と量を重視し、それを継続的に改善していくアプローチを指します。自動運転においては、実際の道路状況や交通シナリオに関する高品質なデータが豊富にあるほど、AIはより賢く、安全な運転を学習できるようになります。

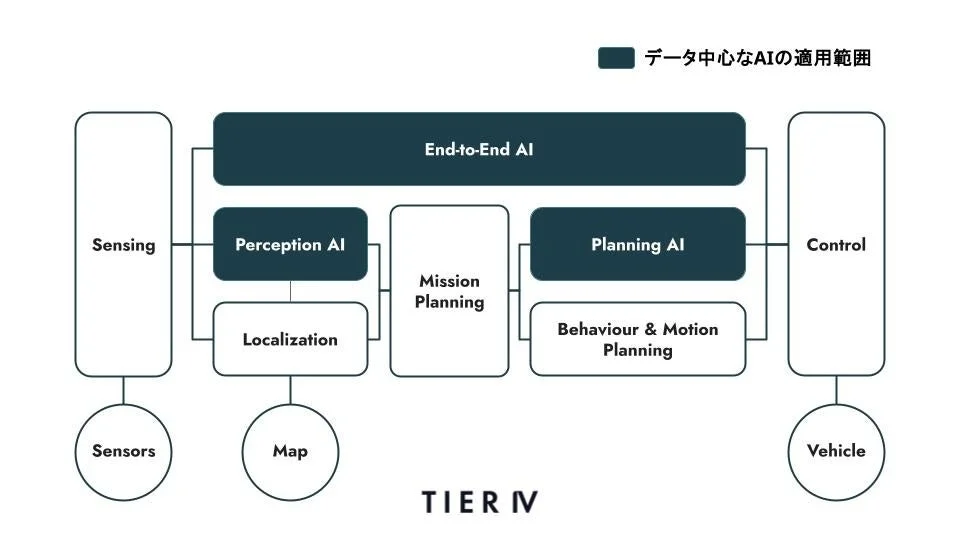
多様な環境に対応する2つのAIソフトウェア構成
今回公開されたAIベース型自動運転レベル4向けソフトウェアスタックは、多様な走行環境への適応性と拡張性を考慮し、特定のハードウェア構成に依存しない柔軟な設計が特徴です。自動車メーカーは、自社の設計や運用ニーズに合わせて、以下の2つのソフトウェア構成から選択できます。
1. 認識AIと経路生成AIを組み合わせたハイブリッド系
このシステムは、車両の周囲の状況を認識するAIと、その情報に基づいて走行経路を計画するAIを組み合わせています。具体的には、以下のような技術が活用されています。
-
拡散モデルによる周囲環境の把握: 拡散モデルというAI技術を用いて、周囲の環境が時間とともにどのように変化するかを確率的に捉えます。これにより、予測が難しい交通状況(例:歩行者の動きや他の車両の進路変更など)にも対応しやすくなります。
-
機械学習モデルによる環境認識: 別の機械学習モデルが、カメラやレーダー、LiDARなどのセンサーから得られた情報をもとに、車両、歩行者、信号、道路標識などを正確に認識します。
-
人間の運転行動を模倣した判断と走行軌跡の生成: これらの情報を統合し、まるで人間が運転しているかのように、状況に応じた適切な判断を行い、安全で自然な走行軌跡(車の動き)を生成します。例えば、割り込み車両に対してスムーズに減速したり、車線変更を適切に行ったりする能力が向上します。
2. すべての運転行動をひとつのAIで行うエンドツーエンド(E2E)系
エンドツーエンド(E2E)系は、より統合されたAIアプローチです。このシステムでは、周辺環境の認識から運転判断、そして走行軌跡の生成まで、すべての運転行動を1つの大きなAIモデルで一気通貫に処理します。
-
周辺環境や走行状況をベクトル表現として扱う: センサーから得られる膨大な情報を、AIが処理しやすい「ベクトル」という数学的な形に変換します。これにより、複雑な情報を効率的にAIモデルに学習させることができます。
-
世界モデルの概念を活用: AIが仮想的な「世界モデル」を内部に構築し、現在の状況から未来の状況を予測する能力を持ちます。これにより、単なる反応的な運転ではなく、より先読みした、人間らしい運転が可能になります。
-
認知・判断・操作を統合的に学習: 従来のシステムのように各機能を個別のモジュールに分けるのではなく、これらすべてをまとめてAIに学習させることで、よりスムーズで効率的な運転を実現します。例えば、急な飛び出しがあった場合でも、認識、判断、ブレーキ操作までを一瞬で連携させることができます。
これらの2つのソフトウェア構成は、自動車メーカーが自社の車両やビジネスモデルに合わせて、最適な自動運転システムを開発するための強固な基盤となります。このソフトウェアスタックは、「Autoware」のリポジトリが管理されているGitHubで公開されています。
自動運転AIの性能を支える機械学習基盤(MLOps)
自動運転AIの性能を継続的に向上させるためには、高品質なデータを効率的に収集・処理し、AIモデルを開発・運用する仕組みが不可欠です。ティアフォーは、このための強力な「機械学習基盤(MLOps:Machine Learning Operations)」を提供しています。
MLOpsは、AIモデルの開発から運用までの一連のプロセスを自動化・効率化するための仕組みです。ティアフォーのMLOpsでは、以下のような機能が提供されます。
-
走行データの品質確認: 車両から収集された走行データが、AIの学習に適した品質であるかを確認します。データの欠損やノイズがないかをチェックし、質の高いデータのみを選別します。
-
映り込んだ人の匿名化: プライバシー保護のため、走行データに映り込んだ人々の顔やナンバープレートなどの個人情報を自動的に匿名化します。これにより、安心してデータを扱えるようになります。
-
検索のためのタグ付け: 収集したデータには、特定のシナリオ(例:交差点、雨天時、夜間など)を示すタグが自動的、または手動で付けられます。これにより、必要なデータを素早く検索し、AIの学習に活用できます。
-
アクティブ・ラーニング基盤による評価に基づくアノテーション: AIモデルが苦手とする、または誤認識しやすいシーンを特定し、その部分のデータに優先的に「アノテーション」(AIが理解できるように人間が情報を付与する作業)を行います。これにより、AIが効率的に学習し、性能を向上させることができます。
-
仮想データの統合: 実際の走行データだけでなく、様々な条件を付けてコンピューター上で生成された「仮想データ」も統合して活用します。これにより、現実世界ではなかなか遭遇しないような危険なシナリオや、多様な環境条件でのAIの学習を可能にし、自動運転システムの機能性をより広範囲で評価できます。
これらの最先端技術の開発は、株式会社松尾研究所との協業をはじめとする数多くのパートナーシップによって支えられています。今後は、自動車メーカーとの協業を通じて、大規模な走行データとMLOpsの様々な機能を活用し、AIモデルの性能を継続的に改善することで、高い実用性を備えたAIベース型自動運転レベル4の実現を目指しています。
世界を舞台にした日米欧3拠点での試験走行
ティアフォーは、データ中心のAIが自動運転レベル4にもたらす有効性を検証するため、日本、米国、欧州の3つの地域で試験走行を開始しました。それぞれの地域では、現地の法令や安全基準に基づき、異なる交通特性、車両、システム・オン・チップ(SoC)、センサー構成を用いて検証が行われます。これにより、多様な環境下でのAIの適応能力が試されます。
各地域での試験走行は、1回あたり約60分を要し、安全確保のために安全要員が同乗します。しかし、安全と判断される走行中の操作介入は想定されていません。これは、AIシステムが自律的に運転する能力を最大限に評価するための措置です。
東京(日本)での取り組み
日本では、東京大学と連携し、トヨタ製の「JPN TAXI」を使用します。都心部の拠点間を移動する際のユーザー体験を検証することが目的です。日本の複雑な交通状況や、タクシー利用者のニーズにAIがどのように応えるかが注目されます。
ピッツバーグ(米国)での取り組み
米国では、カーネギーメロン大学と連携し、ヒョンデ製の「IONIQ 5」を使用します。ピッツバーグ国際空港と大学の往復を含む市街地でのロボットタクシー実証が行われます。米国の都市部特有の交通環境や、空港送迎といった具体的なサービスモデルでの実用性が検証されます。
ミュンヘン(欧州)での取り組み
欧州では、ミュンヘン工科大学と連携し、フォルクスワーゲン製の「T7 Multivan」を使用します。大学周辺の市街地における様々な走行シナリオに対する安全性評価を行います。欧州の都市環境における交通ルールや文化、多様な道路状況にAIがどのように対応するかが試されます。
これらの国際的な協調体制を通じて、ティアフォーはオープンソースを基盤とした自動運転レベル4の社会実装と、その持続的な発展を推進していきます。
各界の専門家が語るティアフォーの自動運転技術への期待
今回の発表にあたり、ティアフォーの代表取締役 執行役員 CEO 加藤真平氏は、「環境に応じて自律的に成長し続ける自動運転技術が求められている。今回公開したデータ中心の自動運転AIのモデルと協調型の機械学習基盤は、そのための共通言語であり、産業全体で共有できる出発点である」とコメントしています。オープンソースの「Autoware」とともに、学術機関、産業界、開発コミュニティと協調して技術開発に取り組むことで、技術が社会に開かれ、継続的に発展していく環境を整えることを目指しているとのことです。
「The Autoware Foundation」のChairman of the Board of Directors であるYang Zhang氏も、「Autowareは、世界中の研究者、企業、開発者が協力して自動運転ソフトウェアを進化させるための基盤である。日米欧の3地域での走行実証を通じて、標準にもとづいた技術発展と、多様なパートナーが参加できるオープンなエコシステムをさらに拡大していく」と、国際的な協業体制の強化とエコシステムの拡大への期待を述べています。
また、東京大学大学院工学系研究科の松尾豊教授は、「今回公開されたソフトウェアスタックとMLOpsは、高度化されたAIモデルを産業向けに実装するための重要な一歩である。東京での実証を通じて、日本特有の交通環境におけるデータを蓄積し、それをAutowareに還元することで、研究と社会実装の距離をさらに縮めることを目指す」と、日本におけるデータ蓄積とその還元による研究推進の重要性を強調しています。
カーネギーメロン大学のジョージ・ウェスティングハウス記念教授であるRaj Rajkumar氏、ミュンヘン工科大学のAutonomous Vehicle Systems担当教授であるJohannes Betz氏からも、それぞれピッツバーグ、ミュンヘンでの実証が、都市部特有の交通状況や欧州の都市環境における技術評価の貴重な機会であり、グローバルな自動運転技術の発展に極めて重要であるとのコメントが寄せられています。
ティアフォーが描く自動運転の未来
株式会社ティアフォーは、「自動運転の民主化」をビジョンに掲げ、自動運転用オープンソースソフトウェア「Autoware」の開発を主導するディープテック企業です。自社製品として「Autoware」を活用したソフトウェアプラットフォームを提供し、それらを基盤に市場ニーズに応じた自動運転における各種サービスを展開しています。
ティアフォーは、株式会社ティアフォーが作り出すエコシステムを通じて、世界中のパートナーと連携しながら自動運転の可能性を広げ、より安全で持続可能な社会の実現を目指しています。今回のAIベース型自動運転レベル4の公開と日米欧での試験走行は、そのビジョンを実現するための大きな一歩と言えるでしょう。
まとめ:AIベース型自動運転レベル4がもたらす社会変革
ティアフォーが公開したAIベース型自動運転レベル4向けソフトウェアスタックは、データ中心のAIとオープンソースの「Autoware」を核に、自動運転技術を次のステージへと押し上げる画期的なものです。日米欧の3拠点での国際的な連携と試験走行は、多様な環境での実用性を検証し、自動運転の社会実装を加速させるでしょう。この技術が普及することで、私たちの移動はより安全に、より効率的に、そしてより快適になる未来が期待されます。

