ヒューマノイドロボット導入の壁を打ち破る!Forcesteed Roboticsが開発した汎用AIコントローラ「Forcesteed-LEIVOR」とは?
近年、SFの世界から飛び出してきたかのような「ヒューマノイドロボット」が、私たちの日常生活や産業現場に登場し始めています。人間と同じような二足歩行や腕の動きができるロボットは、未来への期待を大きく膨らませる存在です。
しかし、実際にこれらのロボットを工場や物流倉庫といった現場に導入し、人間のように多様な作業をこなさせるには、まだ多くの課題が存在します。特に、ロボットを思い通りに動かすための「プログラミング」や「学習」のプロセスは、専門的な知識と時間が必要とされてきました。
そんな中、株式会社Forcesteed Roboticsが、この課題を解決する画期的な汎用ヒューマノイドコントローラ「Forcesteed-LEIVOR(レイバー)」を開発しました。このシステムは、従来のロボット開発の常識を覆し、ヒューマノイドロボットの現場導入を大きく加速させる可能性を秘めています。AI初心者の方にもわかりやすく、Forcesteed-LEIVORがどのような技術で、何を目指しているのかを詳しくご紹介します。
ヒューマノイドロボットが現場で活躍するための課題
ヒューマノイドロボットは、人間に近い形をしているため、人間が働く環境にそのまま導入できるという大きなメリットがあります。しかし、その導入はまだ限定的で、多くの企業が導入に踏み切れないでいるのが現状です。その背景には、主に二つの大きな課題があります。
1. 開発手法のギャップ
これまでの産業用ロボットは、特定の作業を正確に繰り返すことに特化していました。そのため、ロボットの動きを人間が一つ一つ「教え込む」ティーチングという手法が一般的です。例えば、アームをこの位置に動かし、部品を掴み、あちらに置く、といった一連の動作をプログラムとして記述します。この手法は、精度が高く、安定した作業には非常に優れています。
しかし、ヒューマノイドロボットは、人間のように多様で複雑な動きが求められます。状況に応じて判断を変えたり、未経験の作業にも対応したりする必要があるため、ティーチングだけでは対応が難しい場面が多くなります。
近年のAIロボティクスでは、人間が実際に作業する様子を見せてロボットに「模倣学習」させたり、AIが状況を「推論」して自律的に行動を生成するアプローチが注目されています。これは、ロボットが人間のように自ら学び、考える能力を持つことを目指すものです。
この二つの開発思想の違いが、ヒューマノイドロボットの導入を阻む大きな壁となっていました。従来の産業用ロボットの導入を担ってきた「ロボットSIer(システムインテグレーター)」と呼ばれる企業は、ティーチングやプログラム設計に関する豊富なノウハウを持っています。しかし、AIロボティクスの新しいアプローチにそのまま適応させることは難しく、技術的なギャップが生じていました。
2. 高度な専門知識とコスト
AIロボティクスをヒューマノイドロボットに適用するには、機械学習や深層学習といったAIの専門知識、そして複雑なシミュレーションやデータ処理を行うための高性能な計算リソースが必要です。これらの専門知識を持つ人材は限られており、導入コストも高くなりがちです。そのため、一部の先端企業や研究機関に限定され、多くの企業がPoC(概念実証:新しいアイデアや技術が実現可能か、効果があるかを検証する初期段階の試み)を進めることすら難しい状況でした。
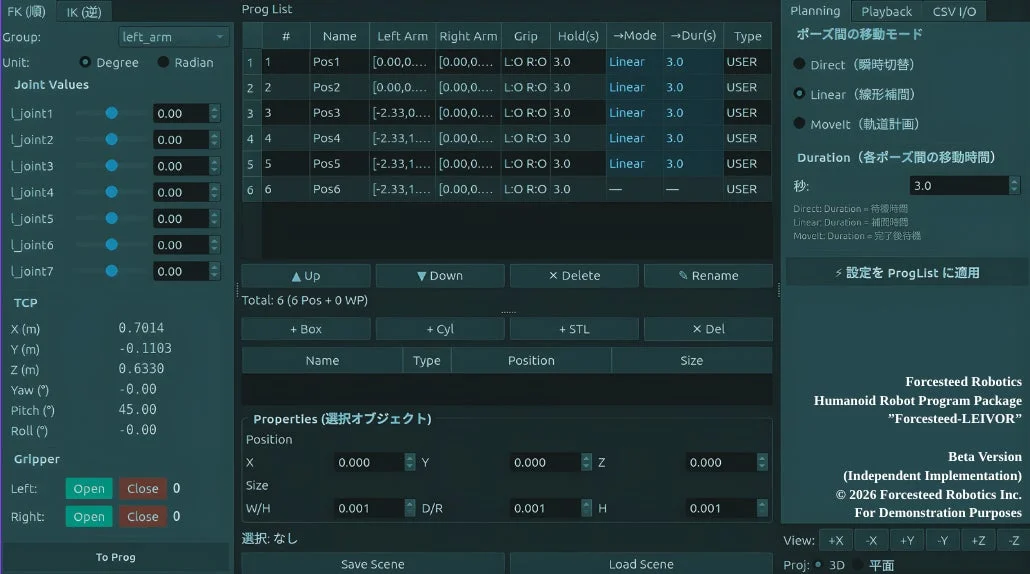
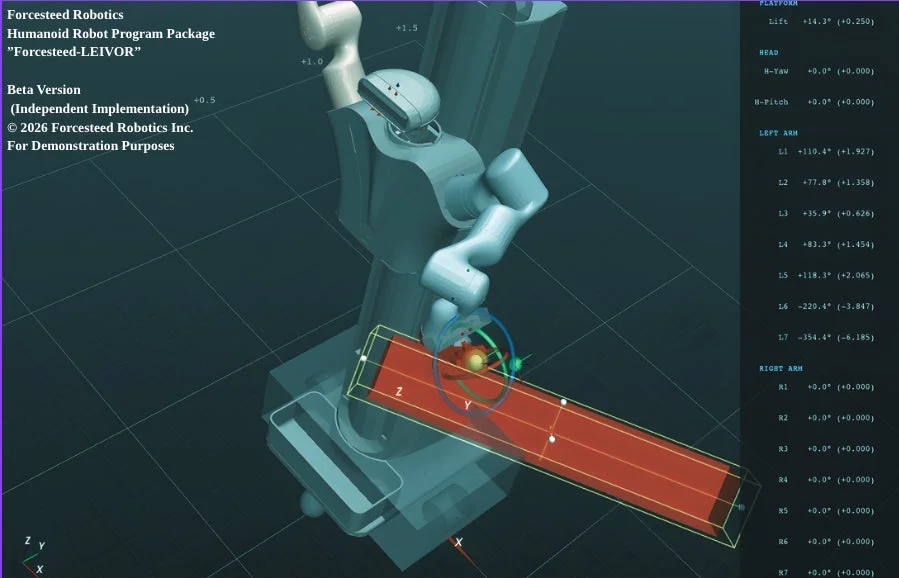
Forcesteed-LEIVORとは?AIとロボット技術を統合する汎用コントローラ
Forcesteed Roboticsが開発した「Forcesteed-LEIVOR」は、これらの課題を解決するために生まれた、汎用ヒューマノイドコントローラです。このシステムは、従来のティーチングによるプログラミング型ロボット開発と、AIによる模倣学習・推論処理という二つのアプローチを一つのフレームワークに統合することを目指しています。

Forcesteed-LEIVORは、以下の4つの要素を一体的に扱うことができます。
-
Learning(学習): ロボットが新しいスキルや知識を習得するプロセスです。例えば、人間が行う作業の動画データから、ロボットがその動きを模倣して学ぶ「模倣学習」などが含まれます。
-
Execution(動作生成): 学習した内容やプログラムに基づいて、ロボットが具体的な動きを作り出すプロセスです。これにより、ロボットは与えられたタスクを実行するための最適な動作を生成します。
-
Intelligent Behavior(知的行動): AIが状況を判断し、自律的に意思決定を行う能力です。例えば、予期せぬ障害物があった場合に、それを避けて作業を続行するといった、柔軟な対応を可能にします。
-
Operation(実行制御): ロボットの物理的な動きを正確にコントロールする部分です。AIが生成した動作や学習した動きを、実際にロボットの関節やモーターに伝達し、スムーズに実行させます。
これにより、ロボットSIerは、これまで培ってきたティーチングのノウハウを活かしつつ、最先端のAIロボティクス技術をヒューマノイドロボットの導入・運用に適用できるようになります。Forcesteed-LEIVORは、ヒューマノイドロボットの導入を一部の先端プレイヤーや研究開発用途にとどめるのではなく、より多くの現場でPoCを進めやすくすることを目指しています。
Forcesteed Roboticsは、「Forcesteed-LEIVORは、産業用ロボット領域における統合コントローラーの思想をヒューマノイド分野に拡張した位置付け」であると説明しています。
Forcesteed-LEIVORの主な特長
Forcesteed-LEIVORには、ヒューマノイドロボットの現場導入を加速するための、いくつかの重要な特長があります。
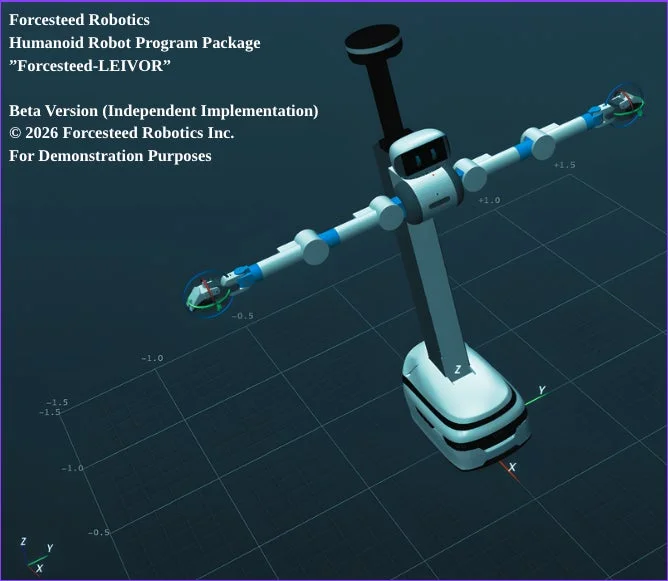
1. ヒューマノイド向け「汎用ヒューマノイドコントローラ」
Forcesteed-LEIVORの最大の特長の一つは、それが「汎用」であるという点です。これは、特定のヒューマノイドロボットの機種にしか使えないソフトウェアではなく、様々なメーカーの複数のヒューマノイドロボットや、人間と似た形をした「セミヒューマノイド」ロボットに適用できることを意味します。
多くのロボットはそれぞれ異なる開発環境やプログラミング言語を持っていることが多く、複数の種類のロボットを導入しようとすると、それぞれに合わせた知識やツールが必要になります。しかし、Forcesteed-LEIVORは共通の開発基盤として機能するため、ロボットの機体ごとに開発環境を分ける必要がありません。
現時点では、ugo、RealMan、Unitreeといった主要なヒューマノイドロボットに対応しており、今後も対応するロボットが随時拡張される予定です。これにより、企業は特定のロボットメーカーに縛られることなく、自社のニーズに合ったヒューマノイドロボットを選択し、Forcesteed-LEIVORを使って一元的に管理・開発できるようになります。
2. ロボットSIerの開発手法を活かした導入
前述の通り、これまでの産業用ロボットの現場では、ティーチングやプログラム設計といった手法が長年培われてきました。ロボットSIerは、これらの技術やノウハウを豊富に持っており、日本の産業を支えてきた重要な存在です。
Forcesteed-LEIVORは、これらの既存の開発手法を活かせるように設計されています。AIロボティクスの最先端技術を導入する一方で、SIerが慣れ親しんだティーチングやプログラム設計の考え方をヒューマノイドロボットの動作設計や業務実装に応用できるため、新しい技術への移行がスムーズになります。
これにより、SIerは、改めてAIの専門家を育成したり、全く新しい開発環境にゼロから適応したりする負担を軽減できます。既存の人材や技術リソースを最大限に活用しながら、ヒューマノイド分野への取り組みを加速させることが可能になります。これは、ヒューマノイドロボットの普及において、現場に最も近いSIerの力を借りることで、現実的な導入を後押しする重要なアプローチと言えるでしょう。
3. 模倣学習・推論の組み込みに対応
Forcesteed-LEIVORは、単に従来のプログラミングを可能にするだけでなく、最先端のAI技術である「模倣学習」や「推論処理」を簡単に組み込めるように設計されています。
-
模倣学習: 人間が実際に行う作業のデータ(動画やセンサー情報など)を使って、ロボットがその動きや判断を「真似て学ぶ」技術です。例えば、人間が複雑な部品の組み立て作業を行う様子をロボットに見せるだけで、ロボットがその作業を習得できるようになります。これにより、ティーチングでは設定が難しい細かな動きや、熟練者の「コツ」といったものをロボットに学習させることが可能になります。
-
推論処理: AIが現在の状況を認識し、過去の経験や学習データに基づいて、次にどのような行動を取るべきかを「考える」能力です。例えば、作業中に予期せぬ物体が置かれていた場合、AIがそれを認識し、どのように避けるべきか、あるいはどのように対処すべきかを判断して、自律的に動作を変更することができます。
これらのAI技術を組み合わせることで、従来のティーチングだけでは対応が難しかった、環境が常に変化する現場や、予測不可能な状況への対応力が大幅に向上します。例えば、製造ラインの微妙な変化や、物流倉庫での商品の配置のずれなどにも、ロボットが柔軟に対応できるようになるでしょう。
また、Forcesteed-LEIVORは、近年注目されている「VLA(Vision-Language-Action)モデル」を活用したロボット制御と、従来のルールベース制御を組み合わせた柔軟な運用を可能にします。VLAモデルとは、視覚(Vision)情報と言語(Language)情報を統合し、ロボットの行動(Action)を生成するAIモデルのことで、より人間のように環境を理解し、指示に従って行動できるロボットの実現に貢献します。
今後の展望
Forcesteed Roboticsは、Forcesteed-LEIVORをさらに進化させ、ヒューマノイドロボットを単なる個別機体としてではなく、「現場に適応する汎用ロボットシステム」として社会に広く普及させることを目指しています。
具体的には、LeRobotをはじめとしたVLAモデルへの対応をさらに拡充していく計画です。これにより、ロボットがより高度な視覚情報と言語情報を理解し、複雑なタスクをこなせるようになることが期待されます。また、画像認識技術の強化や、既に発表されているロボットピッキングパッケージといった既存のシステムとの統合も進められます。
これらの取り組みを通じて、実運用に耐えうる、より賢く、より柔軟なヒューマノイドロボットシステムの構築が推進されることでしょう。将来的には、人間とロボットが共存し、協力し合う「フィジカルAI」の社会実装が、Forcesteed-LEIVORによって加速されることが期待されます。
株式会社Forcesteed Roboticsについて
Forcesteed Roboticsは、AI、画像認識、ロボティクス技術を組み合わせた「フィジカルAI」分野の研究開発および社会実装を行うスタートアップ企業です。現場でのロボット活用を見据え、AIによる認識・判断・制御を統合したシステムの構築や、ロボットが学習するためのデータ収集基盤の提供を通じて、研究開発から実際の現場導入までを一貫して支援しています。
- Webサイト: https://www.forcesteed.com/
まとめ
Forcesteed Roboticsが開発した汎用ヒューマノイドコントローラ「Forcesteed-LEIVOR」は、ヒューマノイドロボットの現場導入における大きな課題を解決する可能性を秘めています。
従来の産業用ロボットのティーチング技術と、AIによる模倣学習や推論処理といった最先端の技術を融合させることで、ロボットSIerはこれまでのノウハウを活かしつつ、多様なヒューマノイドロボットをより手軽に、効率的に導入できるようになります。汎用性の高さ、既存の開発手法との親和性、そして高度なAI技術の組み込み能力は、ヒューマノイドロボットが私たちの社会の様々な場所で活躍するための道を大きく開くでしょう。
Forcesteed-LEIVORは、ヒューマノイドロボットが特別な存在ではなく、私たちの日常を支える「汎用的なツール」となる未来を、きっと実現してくれることでしょう。今後の展開に注目が集まります。

