日本のものづくりが直面する課題:人手に頼る繊細な作業
日本は世界に誇る高品質な「ものづくり」の国として知られています。しかし、製造現場では長年にわたり、特定の作業工程が自動化されずに人手に頼らざるを得ないという課題に直面してきました。たとえば、工場で部品を扱う際、向きがバラバラに置かれた部品の中から正しいものを選び出して取り出す作業や、傷をつけないように非常に優しく扱う必要がある工程などがこれに該当します。
これらの作業は、人間の目と手の器用さ、そして長年の経験に基づく「勘」が求められるため、従来のロボット技術では安定して行うことが非常に困難でした。部品のわずかな形状の違いや、置かれている状況の変化に柔軟に対応し、「そっと触れて扱う」という繊細な動作は、ロボットにとって大きな壁となっていたのです。
少子高齢化による労働力不足が深刻化する中、日本のものづくりが持続的に高品質を維持し、さらに発展していくためには、こうした人手に頼る作業の自動化が不可欠です。この課題を解決するために、株式会社Thinker(シンカー)が革新的なアプローチを提案しています。
Thinkerの挑戦:ロボットが苦手な「そっと触れる」作業の自動化
Thinkerは、家電のように気軽に使えるロボットの実現を目指し、これまでロボットが苦手としてきた「そっと触れて扱う」作業の自動化に取り組んでいます。同社は、この課題を解決するためには、単に賢いAIを導入するだけでなく、ロボットが実際に部品をつかむ「手」にあたる部分、つまりロボットハンドの進化が極めて重要だと考えています。
従来のロボットハンドは、あらかじめ決められた形や位置にあるものを正確につかむことには長けていましたが、不揃いな状態にあるものや、形状が複雑でデリケートなものを扱うのは得意ではありませんでした。人間がコップを持つとき、その重さや滑りやすさを瞬時に判断して握る力を調整するように、ロボットにも同様の「器用さ」と「判断力」が求められます。
Thinkerは、安定して優しくつかめるロボットハンドの設計に注力し、さらに、つかみ方や対象物の状態を正確に把握するための「センシング技術」の向上にも取り組んでいます。これにより、ロボットがまるで人間の手のように、状況に応じて最適な方法で物をつかみ、扱うことを可能にしようとしているのです。
自動化の鍵を握る「器用なロボットハンド」の進化
ものづくりの現場でロボットによる自動化を進める上で、AI(人工知能)の進化は確かに重要です。しかし、AIがどれほど賢くても、実際に物理的な世界で作業を行うのはロボットの「体」であり、特に「手」の部分であるロボットハンドの性能が、自動化の成否を決定づけると言っても過言ではありません。
Thinkerが開発を進める「器用なロボットハンド」は、単に物を掴むだけでなく、その物の形や重さ、表面の状態などを感じ取り、最適な力加減で扱うことを目指しています。これは、まるで熟練した職人が指先の感覚で素材の状態を判断するように、ロボットが「触覚」を持つことを意味します。
この「器用なロボットハンド」を実現するためには、以下のような技術が不可欠です。
-
柔軟な構造: 対象物の形に合わせて変形し、優しく包み込むように掴める構造。
-
高精度なセンサー: 掴んでいる物の圧力や温度、滑り具合などをリアルタイムで感知できるセンサー。
-
精密な制御: センサーからの情報に基づいて、瞬時に力を調整できる制御システム。
これらの技術が組み合わさることで、ロボットはこれまでの「決められた動作を繰り返す機械」から、「状況に応じて自ら判断し、繊細な作業を行う存在」へと進化するのです。
「フィジカルAI」とは? AI初心者にもわかる基礎知識
「フィジカルAI」という言葉は、まだ聞き慣れない方も多いかもしれません。AI(人工知能)と聞くと、多くの人はコンピューターの中でデータを分析したり、画像を認識したりするものを想像するでしょう。しかし、フィジカルAIは、その名の通り「フィジカル(物理的)な世界」で活躍するAIのことです。
簡単に言えば、フィジカルAIとは、ロボットや機械が現実世界でどのように動き、どのように環境と相互作用するかを学習し、最適な行動を生成するためのAIです。
従来のAIが主に「情報」を扱うのに対し、フィジカルAIは「物質」や「動き」を扱います。具体的には、ロボットのセンサー(視覚、触覚など)から得られる物理的な情報(物の形、位置、硬さ、摩擦など)をリアルタイムで分析し、その情報に基づいてロボットがどのように動くべきかを判断し、実行する能力を持っています。
例えば、人間が初めて触る物体でも、その手触りや重さからおおよその特性を理解し、適切な力で掴むことができます。フィジカルAIは、このような人間の「身体的な知能」をロボットに与えることを目指しています。これにより、ロボットは事前にプログラミングされていない未知の状況や、微妙な変化にも柔軟に対応できるようになるのです。
Thinkerが目指すのは、このフィジカルAIと、先に述べた「器用なロボットハンド」を組み合わせることで、製造現場の複雑で繊細な作業を自動化することです。器用なロボットハンドが物理的な「土台」となり、フィジカルAIがその土台の上で「賢い行動計画」を立て、ロボットの動きを調整することで、これまでの常識を覆す自動化が実現すると期待されています。
「器用なロボットハンド」と「フィジカルAI」の融合が拓く新しいものづくり
株式会社Thinkerは、この「器用なロボットハンド」と「フィジカルAI」を組み合わせることで、日本のものづくりに新たな可能性をもたらそうとしています。この融合によって、ロボットは単に決められた動作を繰り返すだけでなく、以下のような高度な作業をこなせるようになります。
- 状況に応じた柔軟な対応: 部品の向きや状態がバラバラでも、フィジカルAIがセンサーからの情報(触覚センサー、近接覚センサーなど)を分析し、最適な掴み方や動作を瞬時に判断します。これにより、これまで人手でしか対応できなかった「不定形なもの」のピッキングや組み立てが可能になります。
- 繊細な力加減の実現: 器用なロボットハンドが持つ柔軟な構造と高精度なセンサーが、対象物のデリケートな表面を傷つけずに優しく扱うことを可能にします。フィジカルAIがリアルタイムで力加減を調整することで、まるで人間の指先のような繊細な作業が実現します。
- コスト削減と効率向上: 従来、不揃いな部品のピッキングには、高価な画像認識システムが必要となることがありました。しかし、Thinkerの技術は、ロボットハンド自体の器用さとフィジカルAIの組み合わせにより、カメラだけに頼らない自動化を可能にし、システム全体のコスト低減に貢献します。これにより、中小企業でも導入しやすい自動化システムが提供される可能性が広がります。
この技術融合によって、これまで人の手に頼ってきた工程を、品質を保ちながら安定して自動化することが目指されています。これは、労働力不足の解消だけでなく、生産性の向上や、より安全な作業環境の実現にもつながるでしょう。
次世代ロボットハンド「Think Hand F」の革新性
Thinkerが独自に開発した次世代ロボットハンド「Think Hand F」は、まさに「器用なロボットハンド×フィジカルAI」のコンセプトを体現する製品です。

「Think Hand F」の最大の特徴は、「バラ積みを“まさぐりながら”つかむ」という、これまでにない新しいアプローチを実現している点です。
通常、ロボットがバラバラに積まれた部品をピッキングする場合、高精度なカメラで部品の位置や向きを正確に認識し、それに基づいてロボットアームを制御するのが一般的でした。しかし、この方法では、カメラシステムの導入や複雑なプログラミングに多額のコストがかかることが課題でした。
「Think Hand F」は、この課題に対し、異なる解決策を提示します。その秘密は、以下の2つの要素にあります。
-
柔軟な関節構造: 人間の指のように、対象物の形に合わせて柔軟に変形する関節機構を持っています。これにより、多少形が不揃いな部品でも、優しく包み込むように掴むことができます。
-
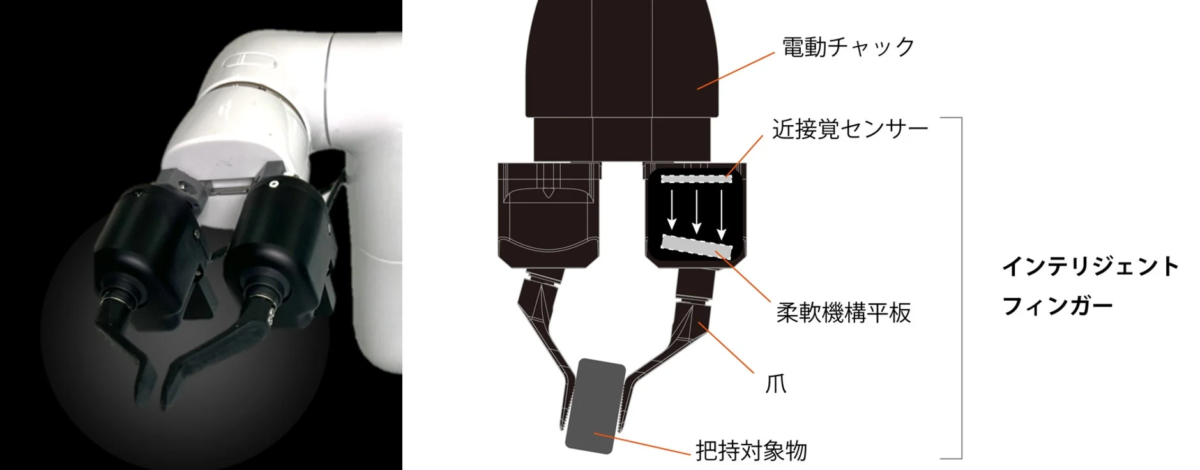
3次元の変位計測が可能な近接覚センサー: ロボットハンドの「爪」の部分に内蔵されたこのセンサーは、対象物に触れることなく、その形状や距離を3次元で感知することができます。これにより、ロボットは対象物に「触れる前」から、その存在や状態を把握し、最適な掴み方を計画できます。
これらの技術を組み合わせることで、「Think Hand F」はカメラだけに頼らず、まるで人間が手探りで物を探すように、対象物の形に合わせてつまみ上げることが可能になります。このアプローチは、自動化システムのトータルコストを低減し、より多くの製造現場での導入を促進すると期待されています。
第18回先端シーズフォーラムでの発表と今後の展望
株式会社Thinkerは、2026年3月6日(金)に開催される「第18回けいはんな学研都市 先端シーズフォーラム」において、代表取締役兼CEOの藤本弘道氏が第1部パネルディスカッションにパネラーとして登壇することを発表しました。
このフォーラムは「フィジカルAIと創る新しい産業・社会システム」をテーマに掲げ、AIが実際の現場でどのように活用され、産業や社会をどのように変革していくのかについて議論される重要な場となります。
藤本CEOは、このパネルディスカッションで、Thinkerが開発する「器用なロボットハンド」と「フィジカルAI」の融合が、日本のものづくりにどのような革新的な可能性をもたらすのかについて発信する予定です。これまで自動化が困難だった繊細な作業工程を、ロボットの「手」と「知能」の進化によって解決する具体的なビジョンが示されることでしょう。
Thinkerは、今後も製造現場で実際に使われるロボットの社会実装を積極的に進め、日本の高品質なものづくりを支える技術の発展に貢献していくことを目指しています。同社の技術が、日本の産業界にどのような影響を与えるのか、今後の動向に注目が集まります。
第18回けいはんな学研都市 先端シーズフォーラム概要
-
日時: 令和8年3月6日(金)15:00~17:30(14:30開場)
-
会場: 産総研・関経連うめきたサイト(Web中継とのハイブリット開催)
グラングリーン大阪 北館 JAM BASE 4階(大阪市北区大深町6番38号)
会場アクセスについては、こちらをご確認ください。 -
参加費: 無料
-
申込締切: 令和8年3月3日(火)
-
申込方法: 参加を希望される方は、こちらよりお申込みください。
-
主催: (公財)関西文化学術研究都市推進機構
-
共催: (公社)関西経済連合会
株式会社Thinkerとは:ビジョンと技術
株式会社Thinkerは、2022年8月に設立された大阪府大阪市に本社を置く企業です。代表取締役兼CEOは藤本弘道氏。
同社は「人とロボットが真に協調できる社会」の実現を目指し、エッジAIと赤外線を駆使した次世代技術「近接覚センサー」を武器に、ロボットハンドの民主化に取り組んでいます。社名の「Thinker」には、「考え抜く集団」「考えるロボット」「ロボットの進化(シンカ)を加速させる」といった深い思いが込められています。
Thinkerは、ロボット技術を特定の専門家だけでなく、誰もが気軽に利用できるものにすることで、製造現場の自動化を加速させ、日本のものづくりをさらに発展させることを目標としています。
詳細については、株式会社Thinkerの公式サイトをご覧ください。
関連情報:Thinkerのこれまでの取り組み
Thinkerの革新的な技術と取り組みは、すでに様々なメディアで注目を集めています。以下に関連リンクをまとめました。
-
空が飛べるスーツから介護改革まで!【未来開発の極意】まず未来を握る!(テレビ大阪ニュース 関西ネオリーダーズ 2025年10月30日放送)
-
スタートレックに学ぶ未来の作り方【関西ネオリーダーズ】(大阪NEWS【テレビ大阪ニュース】 2025年11月30日公開)
-
人間の器用さを再現する「次世代型ロボットハンド」が、製造現場の主流に?Thinkerが挑む少量多品種の自動化(xTECH Powered by MITSUBISHI ESTATE 2025年11月25日)
これらの情報から、Thinkerが多岐にわたる分野でその技術力と将来性を評価されていることがうかがえます。
まとめ:日本のものづくりを支えるThinkerの挑戦
日本のものづくりは、その品質の高さで世界的に評価されていますが、人手に頼らざるを得ない繊細な作業の自動化は長年の課題でした。株式会社Thinkerは、この課題に対し、「器用なロボットハンド」と「フィジカルAI」という二つの革新的な技術を融合させることで、新たな解決策を提案しています。
「Think Hand F」に代表される次世代ロボットハンドは、まるで人間の手のように、対象物の状態を感知し、優しく、そして柔軟に扱うことを可能にします。そして、フィジカルAIは、そのロボットハンドの動きを現実世界で最適化するための「身体的な知能」を提供します。
この技術の組み合わせにより、これまで自動化が困難だったバラ積みのピッキングや、デリケートな部品の取り扱いといった工程が、品質を維持しながら効率的に行えるようになるでしょう。これにより、製造現場の労働力不足の解消、生産性の向上、そして日本のものづくりのさらなる発展に大きく貢献することが期待されます。
Thinkerの挑戦は、日本の産業界に新たな風を吹き込み、ロボットと人間が真に協調できる未来社会の実現に向けた重要な一歩となるでしょう。今後のThinkerの活動に、引き続き注目が集まります。

