bestat、SLAM方式SfMアルゴリズムで3D再構築の安定性を大幅向上
近年、製造業やインフラ分野において、現実世界の設備や構造物をデジタル空間に再現する「デジタルツイン」の構築が注目されています。このデジタルツインを実現するために不可欠なのが、現実の物体を高精度な3Dデータとして取り込む技術です。しかし、これまでの技術には、特に人工物の多い現場でいくつかの課題がありました。
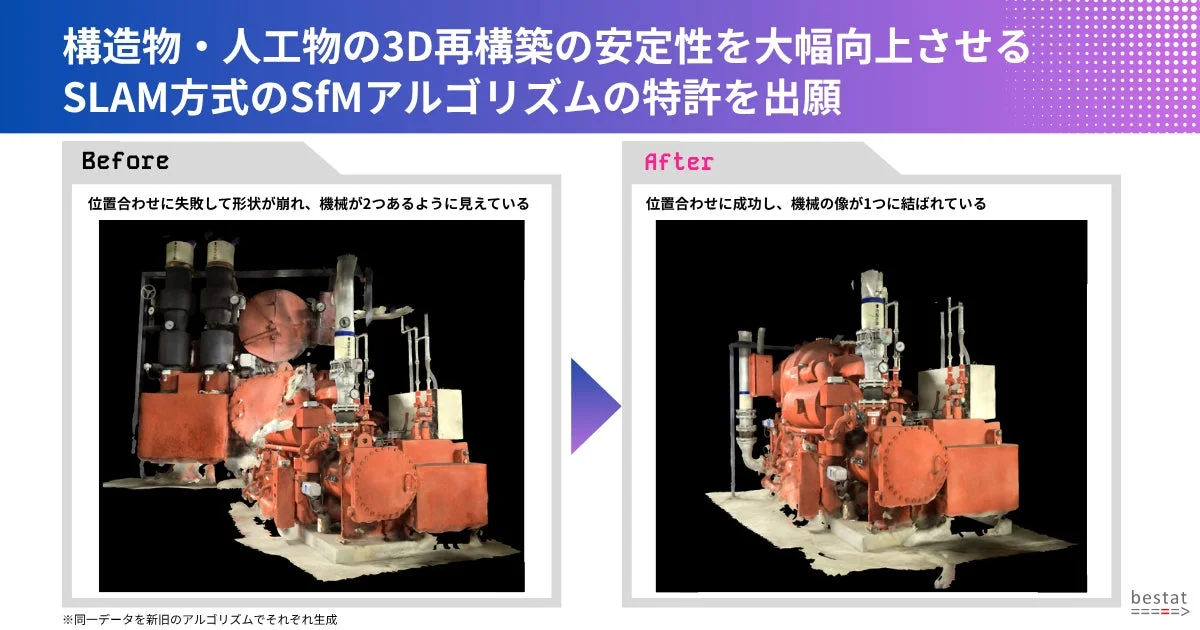
そんな中、3Dデータ処理に特化したbestat株式会社が、画期的な技術を発表しました。同社は、3Dデータ活用クラウドサービス「3D.Core」において、アルゴリズムの一部を刷新。新たに「SLAM方式のSfM(Structure from Motion)アルゴリズム」を実装し、人工物の3D再構築の安定性を大幅に向上させたと発表しました。この独自アルゴリズムは特許出願済みであり、製造・インフラ現場での3Dデータ活用を大きく加速させることが期待されています。

3Dデータ活用の現状と製造・インフラ現場の課題
製造業では工場の設備管理や品質検査、インフラ分野では橋梁やトンネルの点検など、様々な場面で3Dデータの活用ニーズが高まっています。レーザースキャナーやドローン、さらにはスマートフォンを使った撮影で3Dデータを生成する手法が現場に広がりつつあります。
しかし、写真や動画から3Dデータを生成する際には、以下のような具体的な課題に直面することがありました。
-
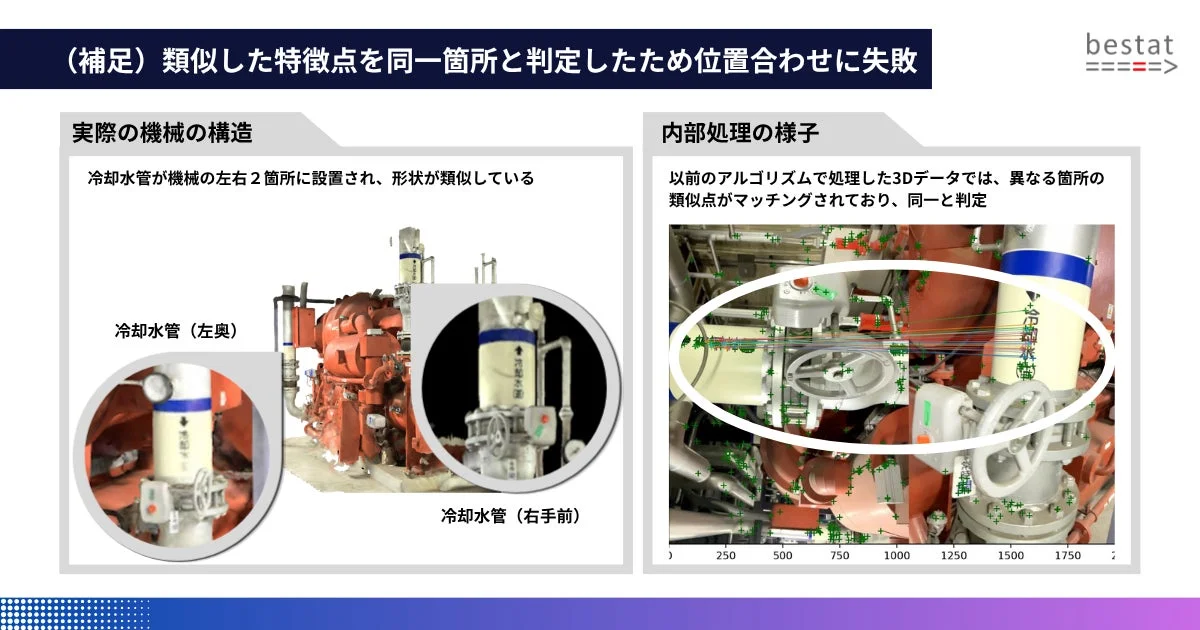
類似箇所を間違えて接合してしまい、モデルが破綻する: 例えば、工場内の同じ形状のパイプや設備が複数ある場合、システムがそれらを区別できずに誤って繋ぎ合わせてしまい、本来とは異なる形状の3Dモデルができてしまうことがあります。
-
撮影したにもかかわらず、3Dデータに欠損が生じる: せっかく撮影した箇所の情報が、なぜか最終的な3Dデータに反映されず、一部が抜け落ちてしまう現象です。
これらの問題は、特に均一な形状や繰り返し構造が多い人工物(人間が作ったもの)が多数存在する製造現場やインフラ設備で顕著でした。これにより、せっかく3Dデータを生成しても、その信頼性や実用性に疑問符がつくケースがあったのです。
bestatの新アルゴリズム「SLAM方式のSfM」とは?
bestatが今回実装した「SLAM方式のSfMアルゴリズム」は、これらの課題を解決するために開発されました。AI初心者の方にも分かりやすく説明するために、まずいくつかの専門用語を解説しましょう。
SfM(Structure from Motion)とは?
SfMは「Structure from Motion」の略で、複数の異なる角度から撮影された写真や動画から、その物体の3D形状(Structure)と、撮影時のカメラの位置・姿勢(Motion)を同時に推定する技術です。写真測量と呼ばれる分野で広く使われています。
SLAM(Simultaneous Localization and Mapping)とは?
SLAMは「Simultaneous Localization and Mapping」の略で、「自己位置推定と環境地図作成を同時に行う」技術です。ロボットが知らない環境を移動しながら、自分の現在位置を推定しつつ、周囲の地図を作成していくようなイメージです。iPhoneのARKitが提供するVI-SLAM(Visual-Inertial SLAM)は、カメラの映像情報(Visual)と内蔵センサー(加速度計やジャイロスコープなどのIMU:Inertial Measurement Unit)の情報を組み合わせて、より安定した自己位置推定を可能にします。
新アルゴリズムの仕組み
従来のVI-SLAMは安定したカメラトラッキング(追跡)を提供しますが、長時間にわたる移動や広範囲の撮影では、位置情報の「累積誤差」が蓄積するという課題がありました。これは、少しずつ生じるズレが積み重なって、最終的に大きなズレになってしまう現象です。
bestatの新アルゴリズムは、このVI-SLAMが提供する安定した位置情報を初期値として活用しつつ、同社独自の「相対ポーズ推定」という技術を組み合わせることで、累積誤差を効果的に補正します。これにより、安定性を保ちながらも、より正確な3Dデータを生成できるようになりました。この技術は、従来のSfMが苦手としていた特定の条件下での安定性を大きく向上させます。
新アルゴリズムがもたらす革新的なメリット
このアルゴリズムの刷新により、現場での3Dデータ生成において、以下のような具体的な改善が実現されます。
1. 致命的な位置合わせ失敗の大幅削減
3Dデータ全体が崩壊したり、物体が二重に表示されたりするような「致命的な位置合わせの失敗」が大幅に減少します。これにより、再撮影や手作業での修正といった手間が減り、より信頼性の高い3Dモデルを得られます。
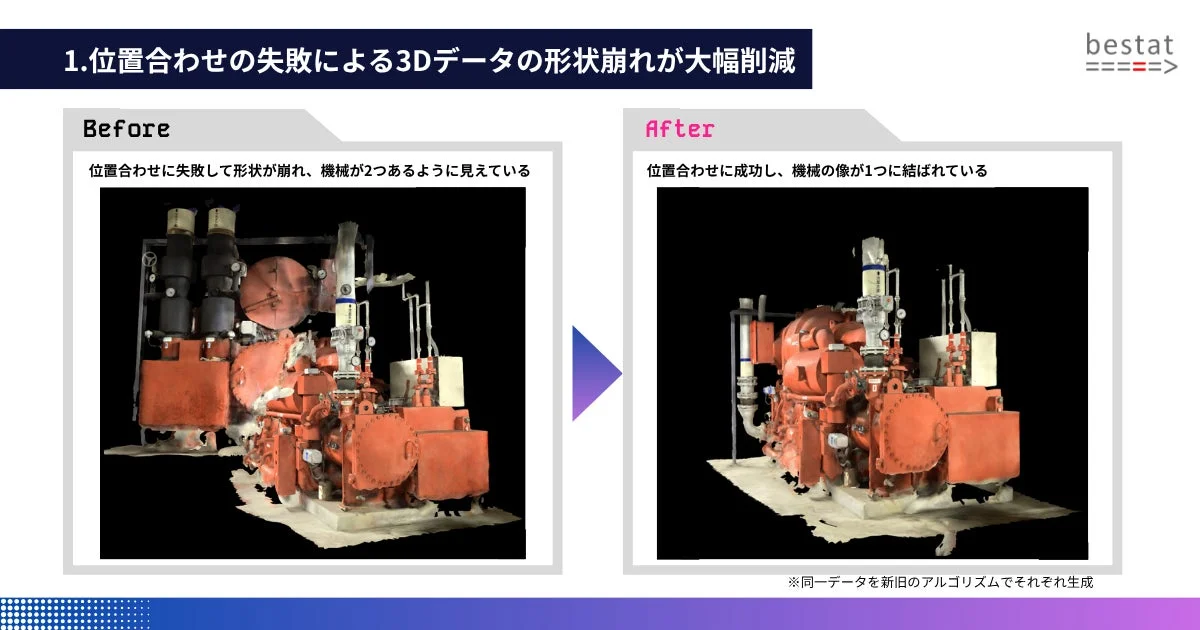
上記の画像を見ると、旧アルゴリズムでは機械の形状が崩れ、二つあるように見えていたものが、新アルゴリズムでは正確に位置合わせされ、一つの機械として認識されていることがわかります。これは、類似した特徴点を誤って同一箇所と判定してしまう従来の問題が解決されたことを示しています。
2. 撮影した箇所の欠損が大幅減少
「撮影したはずなのに、なぜか3Dデータに生成されない」という箇所の欠損が大幅に減少します。これにより、より完全な状態の3Dモデルが得られ、後工程でのデータ修正作業を軽減できます。
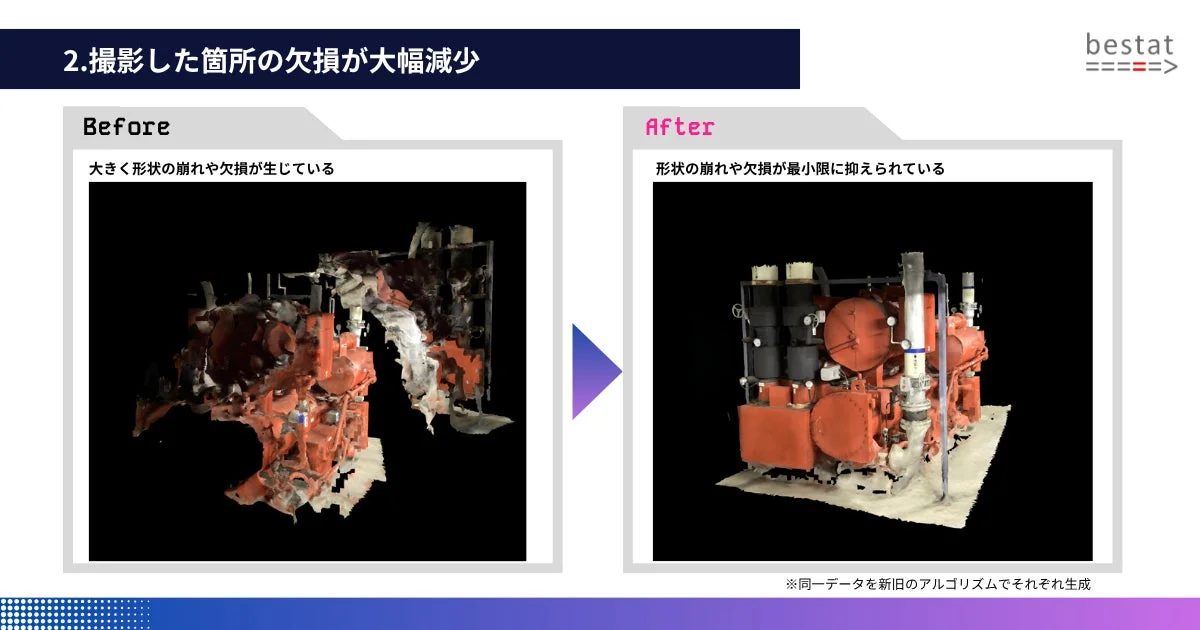
上記の比較画像では、旧アルゴリズムで大きく欠損していた部分が、新アルゴリズムでは最小限に抑えられ、より詳細な形状が再現されていることが確認できます。
新アルゴリズムの技術的特徴を深掘り
bestatが開発した新アルゴリズムの核心は、iPhoneのARKitが提供するVI-SLAMの位置情報を初期値として利用しつつ、そこに独自の「相対ポーズ推定」技術を組み合わせる点にあります。この組み合わせにより、従来のSfMでは難しかった以下のような条件下でも、安定した3D生成が可能となりました。
-
特徴点の少ない人工物・設備への近距離撮影: 例えば、単色の壁やシンプルな形状の機械など、目印となる特徴が少ない物体でも、安定して3Dデータを生成できます。
-
広範囲にわたる人工物のスキャン: 大規模な工場やインフラ施設など、広い範囲をスキャンする場合でも、累積誤差を抑えながら高精度な3Dモデルを構築できます。
-
撮影順序が不規則なデータ: 通常、SfMでは撮影順序がある程度規則的であることが望ましいとされますが、このアルゴリズムでは撮影順序が多少不規則であっても、高品質な3Dデータを生成できる柔軟性を持っています。
ただし、非常に難しい撮影条件下、例えば映り込みが激しい場所、手ブレが大きい場合、または特徴点が極端に少ないといった状況では、品質は改善されるものの、完全にきれいなモデルが生成できないケースもきっとあるでしょう。しかし、一般的な現場での利用においては、その安定性と信頼性は大きく向上すると考えられます。
bestatが目指す未来:3Dデータ活用のさらなる加速
bestat株式会社は、「リアルとデジタルが繋がる時代をつくる」というミッションを掲げ、アルゴリズムの研究から製品への実装までを一貫して自社で開発する体制を構築しています。

同社は、3Dデータ処理技術やAI技術の進化を継続的に製品に反映させることで、製造業やインフラ現場で誰もが簡単に扱える3Dデータ基盤のアップデートを続けていく方針です。今回のアルゴリズム刷新は、その取り組みの一環であり、今後も現場のニーズに応える技術革新が期待されます。
bestat株式会社について
bestat株式会社は、2018年に設立された3Dデータ処理に特化した企業です。代表取締役は松田尚子氏で、東京都文京区に本社を構えています。
主な事業内容は以下の通りです。
-
3Dデータの取得・生成・活用クラウドサービス『3D.Core』シリーズの提供
-
3Dデータ処理API提供
-
デジタルツイン構築
-
3Dデータ活用にまつわる業務のAIエージェント開発
同社の詳細については、以下の公式サイトをご覧ください。
https://bestat-data.com/
まとめ
bestat株式会社が開発し特許出願した「SLAM方式のSfMアルゴリズム」は、製造業やインフラ分野における3Dデータ活用の大きな一歩となります。iPhoneのARKitが提供するVI-SLAMの安定性と独自の相対ポーズ推定を組み合わせることで、これまで課題となっていた位置合わせの失敗やデータ欠損を大幅に削減し、より高精度で信頼性の高い3Dモデル生成を可能にしました。
これにより、デジタルツインの構築や、現場での現況把握、設備管理などの業務がより効率的かつ正確に行えるようになるでしょう。bestatは今後も技術革新を続け、リアルとデジタルが融合する社会の実現に貢献していくことが期待されます。AI技術と3Dデータ処理の進化が、私たちの社会をどのように変えていくのか、今後の動向に注目が集まります。

