横浜市で始まる未来の交通:自動運転レベル4実現に向けた挑戦
バスの運転手不足や交通渋滞、狭い道路でのすれ違いの難しさなど、都市部が抱える交通課題は深刻化しています。このような課題を解決し、より安全で効率的な公共交通を実現するために、横浜市で自動運転バスの実証実験が2026年1月17日から1月22日まで実施されます。この実証実験は、NTTドコモビジネス株式会社を代表機関とするコンソーシアム8社と2つの協力機関、そして横浜市が協力して行われるもので、最先端の通信技術「ローカル5G」と「路側インフラ」を駆使し、「自動運転レベル4」の社会実装を目指す重要な一歩となります。
この記事では、この実証実験がなぜ今必要とされているのか、どのような技術が使われているのか、そして私たちの生活にどのような未来をもたらすのかを、AI初心者の方にも分かりやすい言葉で詳しくご紹介します。
なぜ今、自動運転バスが必要なのか?都市が抱える交通課題と期待
近年、全国的にバス運転手の不足が深刻化し、路線の縮小や運行本数の削減が進んでいます。横浜市も例外ではなく、交通サービスの維持が大きな課題となっています。特に、よこはま動物園ズーラシア周辺では、休日の来園者による交通渋滞や駐車場への入庫待ちの車列が発生し、バスの定時運行や安全確保が難しい状況です。
また、都市部には見通しの悪い交差点や、対向車とのすれ違いが困難な狭い道路が多く存在します。こうした場所での安全な運行には、高度な判断と熟練した運転技術が求められますが、自動運転技術はこれらの課題を解決する可能性を秘めています。
自動運転レベル4とは?
自動運転には、運転支援レベル0から完全自動運転レベル5まで段階があります。今回目指されている「自動運転レベル4」とは、特定の場所や条件下において、システムが全ての運転操作を行い、緊急時にもシステムが対応するレベルを指します。運転手が常に運転席にいる必要がなく、遠隔での監視や操作が可能になるため、運転手不足の解消や運行効率の向上が期待されています。
この実証実験は、総務省の令和6年度補正予算「地域社会DX推進パッケージ事業(自動運転レベル4検証タイプ)」の採択を受けて実施されるもので、昨年度(令和5年度補正予算「地域デジタル基盤活用推進事業(自動運転レベル4検証タイプ)」)に実施された「よこはま動物園ズーラシア周辺での自動運転実証実験」の成果を踏まえ、さらに大規模かつ高度な検証を行います。
実証実験の舞台裏:最先端技術が支える自動運転
今回の実証実験では、自動運転レベル4の安定運行モデルを検証するために、大きく分けて二つの技術的な柱があります。一つは「走行中でも大容量データを安定して送受信できる通信環境の構築」、もう一つは「狭い道路や見通しの悪い区間での安全かつ円滑な自動運転走行支援」です。これらの実現には、様々な最先端技術が活用されています。
1. 安定した通信環境の構築:途切れない「つながり」で安全を守る
自動運転バスは、周囲の状況を把握し、安全に走行するために、常に大量のデータを送受信する必要があります。特に、遠隔地からバスの状況を監視したり、緊急時に遠隔操作を行ったりするためには、通信が途切れることなく、安定した高速通信が不可欠です。
無線リソース最適化で車内遠隔監視を実現
この実証実験では、以下の技術を組み合わせて、都市部の変動する通信環境下でも車両制御に必要な情報を安定的に伝送できることを確認します。
-
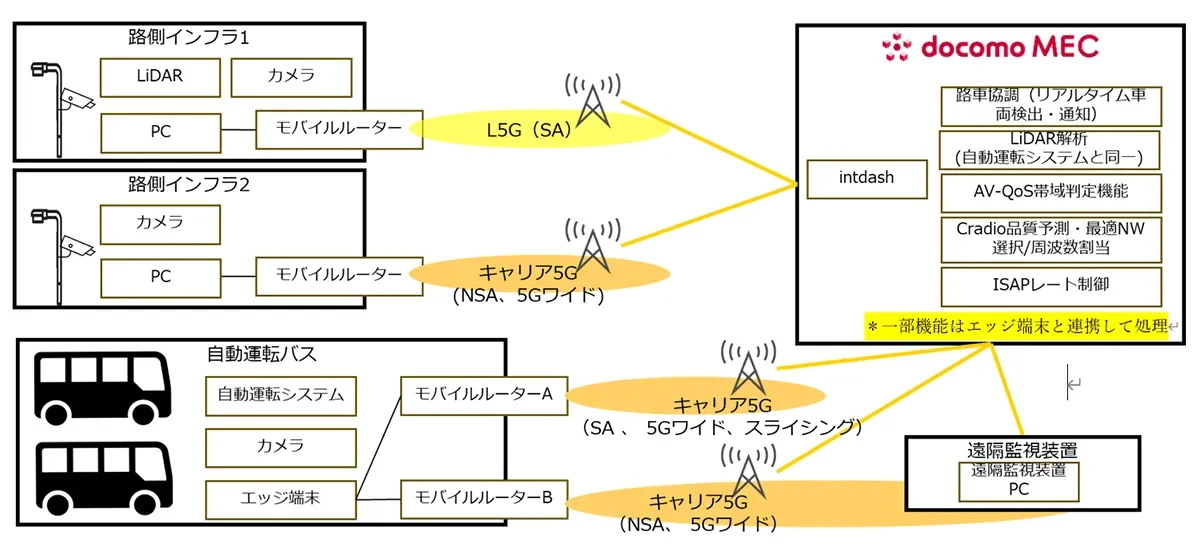
Cradio(クラディオ):NTTが研究開発している「マルチ無線プロアクティブ制御技術」の総称です。これは、複数の無線ネットワークを賢く連携させ、電波の状況が悪くなっても自動で最適なネットワークに切り替えることで、通信の切断や劣化を最小限に抑えます。これにより、ドライバーが意識することなく、常に安定した通信環境を維持することができます。
-
ISAP(アイサップ):NTTが推進する6G時代の通信・コンピューティング基盤技術です。ネットワーク内で情報処理を分散・連携させることで、通信量を効率的に制御し、映像の遅延や画質の劣化を抑える役割を果たします。自動運転バスの車内映像や周囲の状況を高画質でリアルタイムに遠隔監視する上で、非常に重要な技術です。
-
5Gワイド:NTTドコモビジネスが提供するモバイルネットワークサービスで、混雑しているエリアや時間帯でも、安定した通信を維持し、通信速度の向上を図ることができます。都市部の交通量が多い場所での自動運転において、信頼性の高い通信を確保します。
-
ネットワークスライシング:物理的なネットワークを、用途に応じて仮想的に分割する技術です。これにより、自動運転のような高い品質と安定性が求められる通信に対して、専用の「通信の道」を確保することができます。特に、今回は4Gを経由せずに直接5Gネットワークを利用するSA(スタンドアローン)方式が用いられ、より高速で低遅延な通信が実現されます。
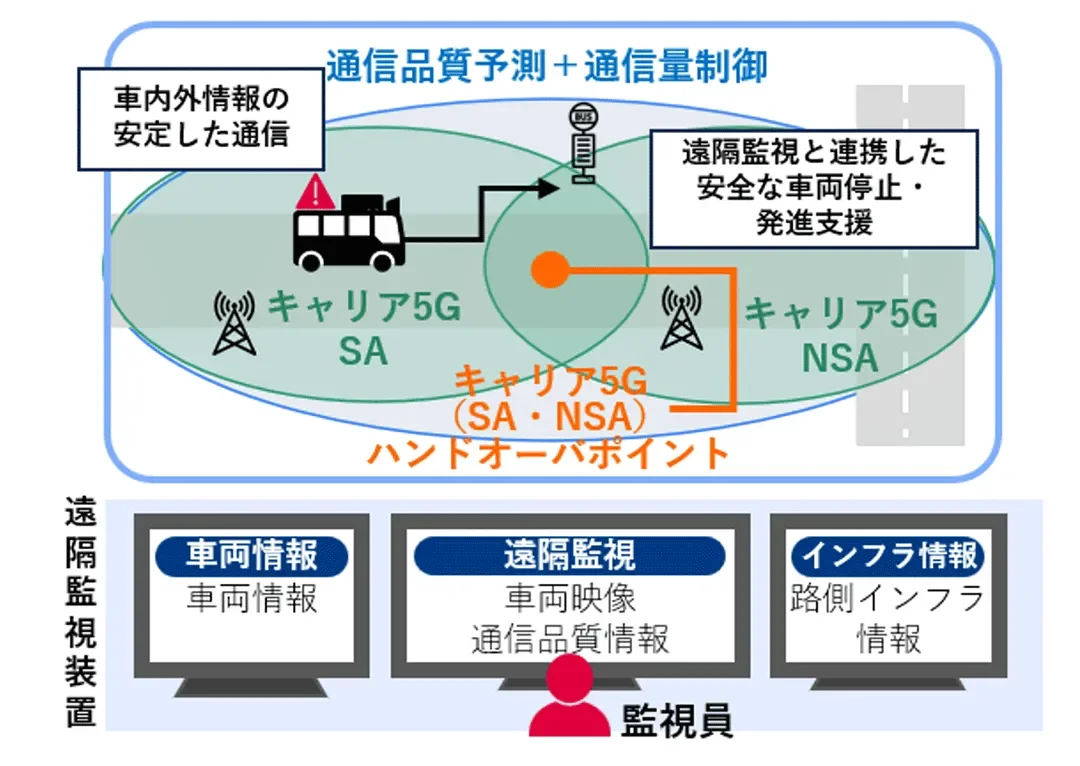
これらの技術を組み合わせることで、バスの車内外の情報を安定して遠隔の監視員に届け、安全な車両の停止や発進を支援します。

監視員負担を考慮した効率的な運用
実証実験では、docomo MEC(R)(以下MEC)という技術も活用されます。MECは、データ処理をクラウドではなく、通信網の近くで行うことで、通信の遅延を大幅に減らし、セキュリティを高めることができるドコモのエッジ型プラットフォームです。このMEC上でリアルタイムに映像処理を行うことで、バス車内の状況を統合的に監視し、1名の監視員で2台の車両を同時に遠隔監視する体制(1:2遠隔監視)を構築します。これにより、監視業務の省人化・効率化を図り、将来的な複数車両同時運行モデルの実現可能性を探ります。
2. 狭い道路や見通しの悪い区間における、安全かつ円滑な自動運転走行を支援する通信・制御基盤の構築
都市部には、見通しの悪い交差点や、対向車とのすれ違いが困難な狭い道路が数多く存在します。このような場所で自動運転バスが安全に運行するためには、車両単独のセンサーだけでは限界があります。そこで、道路側に設置されたインフラと連携する「路車協調技術」が重要になります。
ローカル5Gと路側インフラの連携
本実証実験では、以下の技術を組み合わせて、バスと道路が協力し合う「賢い交通システム」を構築します。
-
ローカル5Gサービス TypeD:NTTドコモのキャリア設備を共有することで、企業などが特定の場所で独自に5Gネットワークを構築・運用できるサービスです。キャリア5Gと併用することで、車両と路側インフラ(LiDAR、カメラ、スマート道路灯)との間で双方向通信を行います。これにより、車両が自力では把握しにくい情報を道路側から受け取ることができます。
-
LiDAR(ライダー):レーザー光を使って対象物までの距離や形状を正確に計測するセンサー技術です。路側に設置されたLiDARやカメラ、スマート道路灯が、見通しの悪い場所の交通状況をリアルタイムで把握し、その情報をバスに伝達します。
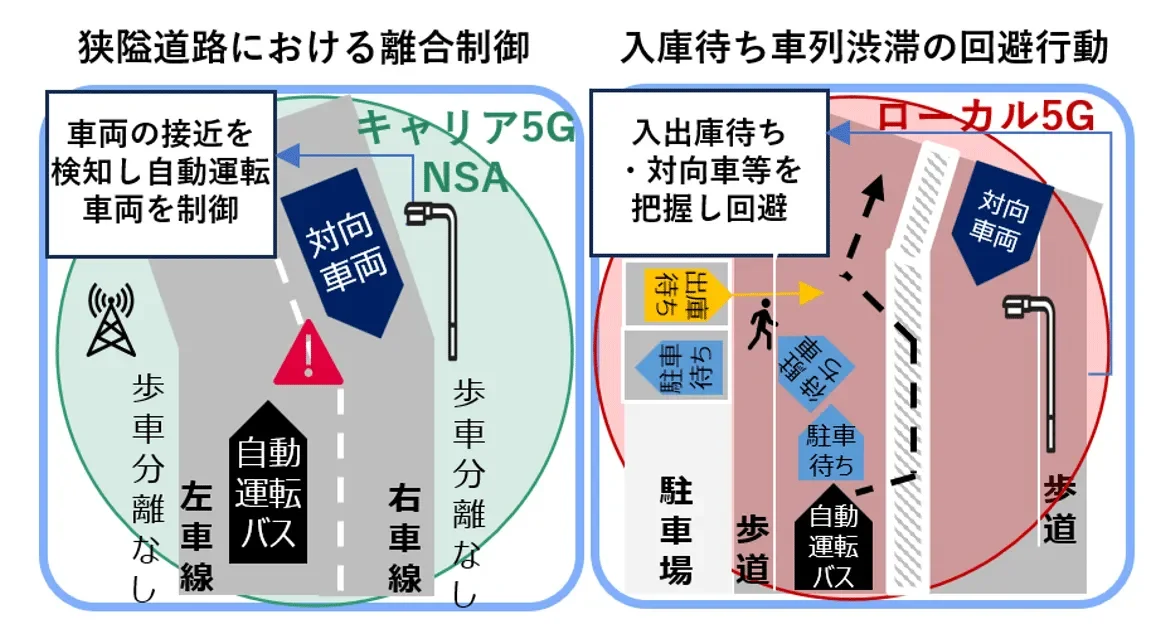
これらのセンサー情報をMEC上で統合・リアルタイム処理し、自動停止・減速・離合判断を車両制御に反映させることで、見通し不良区間や狭い区間での安全な通行を可能にします。例えば、狭い道路で対向車が接近している場合、路側インフラがそれを検知し、バスに情報を提供することで、バスは安全に停止したり、減速してすれ違うタイミングを調整したり(離合制御)することができます。また、見通しの悪い交差点や駐車場出入口における他の車両を即座に把握し、回避する通行も可能になります。
昨年度は通信品質の可視化や映像伝送の安定化が主な検証内容でしたが、今年度は路側インフラ連携や車両間通信の統合制御にまで発展させ、都市部での自動運転における路車協調制御技術の有効性を明らかにします。
実証実験の具体的な内容:横浜の街で体験できる未来
今回の実証実験は、実際に横浜の公道を自動運転バスが走行し、一般の方も試乗できる機会が設けられています。
運行ルートと期間
-
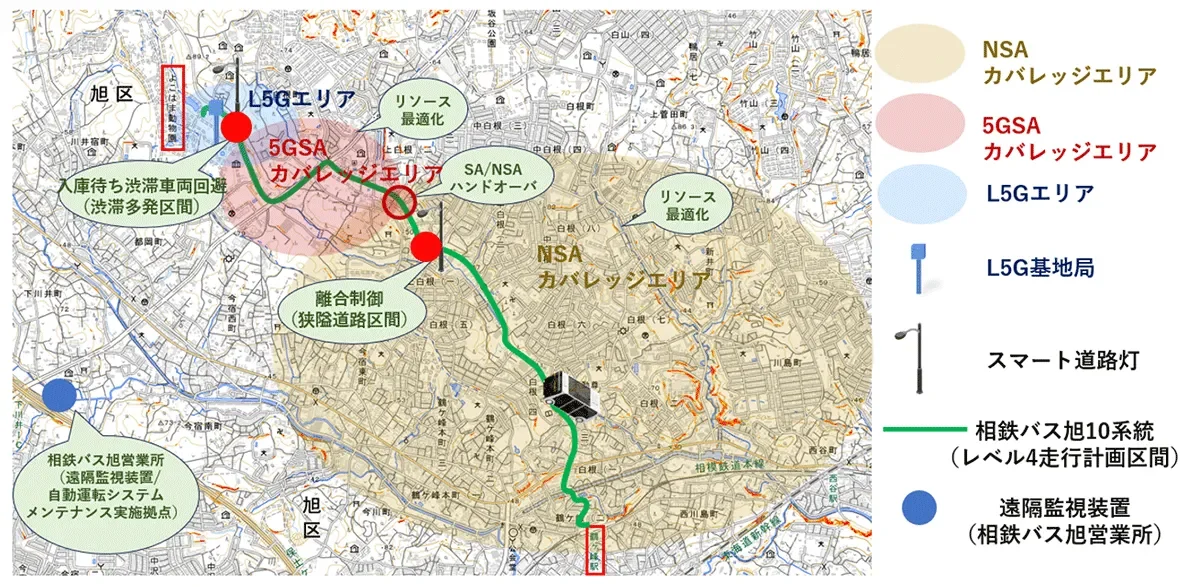
実施場所:神奈川県横浜市 相鉄本線鶴ケ峰駅~よこはま動物園北門(片道約5.3km)
-
運行期間:2026年1月17日~1月22日(土日含む)
-
一般試乗日:1月17日、1月18日、1月21日、1月22日の4日間
自動運転車両
-
車両:日野自動車「ポンチョ」(自動運転レベル2)2台
-
試乗定員:10名

乗車方法と運賃
-
乗車場所:相鉄本線鶴ケ峰駅バスターミナル9番乗り場
-
運行区間:相鉄本線鶴ケ峰駅~よこはま動物園ズーラシア
-
乗車方法:試乗専用乗車予約サイトからの事前予約制(乗車便により定員が異なります)
-
往路(鶴ケ峰駅発→よこはま動物園着): https://coubic.com/952e4759114ee1b8a52e/1605725
-
復路(よこはま動物園発→鶴ケ峰駅着): https://coubic.com/952e4759114ee1b8a52e/1880389
-
-
運賃:無料
天候などの影響により、手動運転への切り替えや運休となる場合があるため、事前に最新情報を確認することが重要です。
実証実験を支える各社の役割
この大規模な実証実験は、NTTドコモビジネス株式会社を代表機関とし、NTTアドバンステクノロジ株式会社、株式会社NTTデータ経営研究所、スタンレー電気株式会社、株式会社東海理化、ドコモ・テクノロジ株式会社、相鉄バス株式会社、先進モビリティ株式会社の8社、そしてNTTアクセスサービスシステム研究所、NTTネットワークサービスシステム研究所の2つの協力機関がそれぞれの専門性を活かして取り組んでいます。
例えば、NTTドコモビジネスは実証実験全体の計画策定からネットワーク構築、遠隔監視システムの提供までを担い、スタンレー電気株式会社は路側インフラであるスマート道路灯の設計・構築・運用を担当します。相鉄バス株式会社は運行に関する知識の提供や運行管理業務を担い、先進モビリティ株式会社は自動運転システムの提供と調整を行います。
個人情報保護への配慮
実証実験では、自動運転バスに搭載されたカメラや道路灯カメラから映像データが取得されますが、これは自動運転車の安全な走行に貢献する目的で利用されます。通行している車両や市民を特定するものではなく、リアルタイム映像データは実証企業関係者のみ立ち入り可能な遠隔管制室等の居室内でのみ取り扱われ、実証完了後は速やかにデータが削除されます。個人情報保護に関する法律やガイドラインを遵守し、データの取得・利用・保存に関する基本方針を策定して運用されています。
未来への展望:横浜から全国へ、持続可能な交通モデルの構築
今回の実証実験を通じて得られる知見は、都市部における自動運転バス運行の安定化・効率化に必要な通信制御および路車協調技術の有効性、そして安全で安心な監視業務のオペレーションを検証する上で非常に貴重なものとなります。これらの知見は、横浜市だけでなく、同様の交通課題を抱える他の都市でも活用可能な情報として整理され、全国各地の都市型自動運転モデルの社会実装に向けた展開が図られる予定です。
活用されているローカル5G、Cradio、ISAP、MEC、5Gワイド、ネットワークスライシングといった最先端の通信基盤技術は、将来の商用自動運転サービスに不可欠な要素です。この実証実験は、2027年度までに想定される全国展開フェーズに向けた重要な検証ステップと位置づけられています。これらの通信・制御技術を統合的に運用することで、遠隔監視・安全制御・データ利活用を一体化した、持続可能な運行モデルの構築を目指しています。
この実証実験は、単に自動運転バスを走らせるだけでなく、未来の都市交通システム全体をデザインし、社会課題を解決するための大きな挑戦です。横浜から始まるこの取り組みが、日本の、そして世界の都市の未来をより豊かで安全なものへと変えていくことが期待されます。
-
総務省 令和6年度補正予算「地域社会DX推進パッケージ事業(自動運転レベル4検証タイプ)」の選定結果: https://www.soumu.go.jp/menu_news/s-news/01ryutsu06_02000431.html

