
AGRISTとMicrosoftが拓くスマート農業の未来:フィジカルAIで収穫ロボットの課題を解決
AI(人工知能)とロボット技術の進化は、私たちの生活だけでなく、社会のさまざまな分野に大きな変革をもたらしています。特に、農業分野では人手不足や高齢化といった課題が深刻化しており、スマート農業への期待が高まっています。そんな中、AIとロボットを活用したスマート農業を提供するAGRIST株式会社が、Microsoft AI Co-Innovation Lab KOBEと協力し、自動収穫ロボットの性能をさらに高めるための画期的な開発検証を実施しました。
この取り組みは、「フィジカルAI」と呼ばれる技術を使い、収穫ロボットが直面する現実世界の複雑な課題をAIの力で解決しようとするものです。具体的には、AIが農作物の状態や周囲の環境を認識し、ロボットが最適な動きをするための「推奨角度」を瞬時に判断する仕組みを検証しました。本記事では、このフィジカルAIがどのような技術で、どのようにして農業の未来を変える可能性を秘めているのかを、AI初心者の方にも分かりやすく、詳しくご紹介します。

AGRISTが挑むスマート農業の課題:ロボット収穫の難しさ
AGRIST株式会社はこれまで、AIを活用して農作物の認識や予測の精度を高め、自動収穫ロボットの現場導入を進めてきました。しかし、実際の農作業現場では、ロボットが収穫作業を行う上でさまざまな難しい課題に直面します。
例えば、キュウリなどの農作物を収穫する際、ロボットアームが対象にアプローチしようとしても、「ヘタが葉に隠れてしまっている」場合や、「周囲に茎や支柱といった障害物がある」場合があります。このような状況では、ロボットアームがスムーズに動けず、収穫に失敗したり、余計な時間がかかってしまったりすることが少なくありません。

きゅうりの栽培で起こりうる二つの状況を比較した画像。左はヘタが葉に隠れている場合、右はきゅうりの成長を妨げる障害物がある場合を示しています。
これらの現場要因は非常に多様で、事前に決められたルール(ルールベース)だけでは全てに対応することが難しいのが現状です。そこでAGRISTは、AIの判断をロボットの実際の動きに直接つなげる「フィジカルAI」という新しいアプローチに注目しました。
フィジカルAIとは?:AIの判断をロボットの動きへ
「フィジカルAI」という言葉を初めて聞く方もいるかもしれません。これは、AIが現実世界の状態を認識・判断し、その結果に基づいてロボットなどの物理的な機械が具体的な行動を起こす一連の仕組みを指します。
従来のロボットは、あらかじめプログラムされた動きや、センサーで得た情報に基づいて単純な判断を行うことが主流でした。しかし、フィジカルAIでは、より高度なAI、特に「生成AI」が、複雑で予測不可能な現実世界の状況を深く理解し、その場で最適な解決策を「生成」します。そして、その生成された解決策(例えば「この角度でアームを動かす」といった指示)を、ロボットが実行するという流れです。
今回のAGRISTの取り組みでは、まさにこのフィジカルAIを活用し、生成AIが収穫ロボットの「回り込みの推奨角度」を算出するという、より高度な判断をロボットに提供することを目指しました。これにより、ロボットがこれまで苦手としていた「ヘタ隠れ」や「障害物」といった状況にも、柔軟かつ効率的に対応できるようになることが期待されます。
開発検証の具体的な内容:5日間の「Sprint」で何が行われたか
AGRISTとMicrosoftは、企業や組織のイノベーションを支援する「Microsoft AI Co-Innovation Lab KOBE」を舞台に、5日間の集中的な開発検証(Sprint)を実施しました。この短期間で、フィジカルAIの有効性を確認するための具体的なステップが踏まれました。
課題設定と目標
まず、開発検証の出発点となったのは、自動収穫ロボットが「ヘタ隠れ」や「障害物」によって適切な進入角度を取れず、収穫できないケースがあるという現場の課題でした。
この課題に対し、目標として設定されたのは、「自動収穫ロボットが、推奨される『回り込み角度』をAIから受け取り、その角度に基づいて動作できること」の確認です。AIからの情報は、プログラミングで扱いやすい「JSON形式」というデータ形式で受け取れるようにすることを目指しました。
実施内容:生成AIとクラウド技術の連携
検証では、以下の具体的な内容が実施されました。
- 生成AIの推論エンドポイント構築: Microsoft Foundryという基盤上で、生成AIが判断結果を導き出すためのプログラム(推論エンドポイント)が構築されました。
- 入力データの整形: ロボットのカメラ(RGBカメラやDepthカメラなど)から得られる画像を、生成AIが分析しやすい形に前処理しました。
- 出力フォーマットの固定: 生成AIが出力する「推奨角度」のデータを、ロボット側で扱いやすいJSON形式に統一しました。
- Azure Functionsの構築・デプロイ: Microsoft AzureのクラウドサービスであるAzure Functionsを使って、生成AIの推論結果をロボットが呼び出せるAPIとして提供する仕組みが作られ、実際に動作できるように配置(デプロイ)されました。
- 動作連携の確認: 最終的に、自動収穫ロボットがAzure Functionsを呼び出し、返却された角度データを使って実際に動作するまでの一連のフローが確認されました。
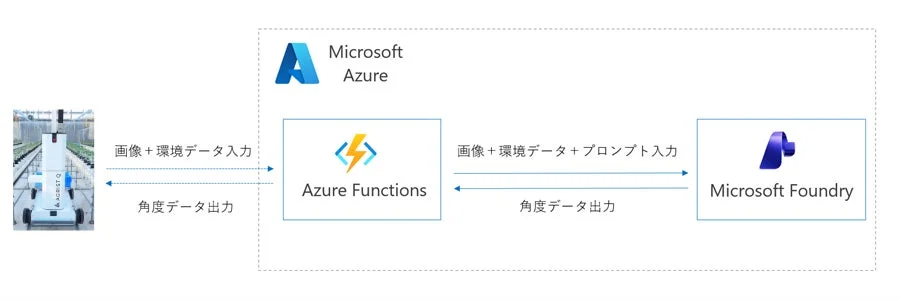
AGRIST QロボットからMicrosoft Azure、Microsoft Foundryを介して角度データが出力されるシステム構成図
主な成果:フィジカルAIの有効性を確認
この短期間のSprintにより、いくつかの重要な成果が得られました。
-
一連のフローの確立: 生成AIが角度データを算出し、それをAzure Functionsを介してロボットの動作へとつなげる一連のシステム連携が確認されました。これにより、各システムが独立して動作しつつも連携できる「疎結合」な実装が実現しました。
-
応答速度の手応え: 生成AIが推論結果を返すまでの時間は、おおむね10秒から30秒程度であり、実用化に向けた十分な手応えが得られました。
-
精度向上のヒント: 画像データの入力方法や前処理を工夫することで、AIの判断精度が向上する可能性が確認されました。これは、今後さらに精度を高めていく上での重要な指針となります。
これらの成果は、あくまでSprint期間中の試作・検証時点での所感ですが、フィジカルAIが収穫ロボットの性能を大きく向上させる有効なアプローチであることが強く示されました。今後は、実際の環境でデータを蓄積し、評価設計を重ねることで、さらに精度と再現性を高めていく計画です。
開発検証中の議論の様子
フィジカルAIがもたらす未来:収穫性能の飛躍的向上
今回の開発検証を通じて、フィジカルAIが農業現場にもたらす可能性が明確になりました。AGRISTの執行役員CTO兼VPoEである清水秀樹氏は、この取り組みの意義を次のように語っています。
「今回のSprintでは、生成AIの推論結果を『自動収穫ロボットが動ける指示(角度データ)』として返すところまでを、Azure Functionsを介したAPIとして組み上げ、動作連携まで確認できました。これはフィジカルAIを現場に実装するうえでの大きな前進です。特に、画像(RGB/Depth等)から状況を解釈し、回り込み角度という形で具体的な行動指示に落とし込める手応えが得られました。データの蓄積と入力設計・前処理、評価方法の整備を進めれば、今後1~2年で実用水準に近づけられる可能性を強く感じています。AGRISTとしても、この領域は収穫性能を大きく引き上げ得る中核技術だと捉えており、開発にさらに力を入れていきます。」
AGRIST 執行役員CTO 兼 VPoE 清水秀樹氏
また、ロボット開発責任者の増渕武氏も、「フィジカルAIは現在急速に発展しており、実運用へ向けて技術を検証することは非常に重要だと考えています。今回、自動収穫ロボット上での動作確認まで到達できたことで、さらなる機能拡張や精度向上に大きな可能性を感じました。今後は実環境でのデータ取得と検証を重ね、収穫性能の向上につながる機能開発を加速させていきます。」と、今後の展望に強い期待を寄せています。
Microsoftのエンジニアからも、この取り組みへの高い評価と期待が寄せられています。Lab Engineerの束田氏は、「本スプリントでは、模擬環境をご用意いただいた上で、ロボット撮影画像の前処理から生成AIによる角度推論までを一連のパイプラインとして設計・実装し、さらにAGRIST様のロボットを用いて障害物回避から収穫地点への移動まで実機で確認できました。野菜の生育状況が多様であることは、収穫率向上に向けた大きな課題の一つであると認識しております。こうした環境変化に柔軟に対応可能なフィジカルAIの取り組みには大きな可能性を感じており、今回のスプリントを通じてその実現性と今後の発展の余地を改めて実感いたしました。」とコメントしています。
Microsoft AI Co-Innovation Lab Engineer 束田氏
Digital Native Scaling TeamのYusuke Satake氏とBassam氏も、「今回のプロトタイプでは、LLM(大規模言語モデル)が実際の環境を理解し、ロボットの動作につながる『回り込み角度』を出力することで、収穫動作の成功率を高める新たなアプローチを示されました。これは、フィジカルAIが農業現場において実際に価値を生み出せることを示す非常に意義ある成果だと思います。」と述べ、AGRISTの技術力と実行力を高く評価しています。
これらのコメントからもわかるように、フィジカルAIは、自動収穫ロボットが直面する多様な現場課題に対し、AIが状況を「理解」し、最適な「行動」を指示することで、収穫成功率の大幅な向上と作業時間の短縮を実現する可能性を秘めています。これは、スマート農業の実現に向けた大きな一歩と言えるでしょう。
今後の展望と社会実装への道
今回の開発検証で得られた手応えを基に、AGRISTは今後、フィジカルAIの実環境での精度、再現性、運用性をさらに高めるための取り組みを進めていきます。
具体的な計画としては、以下のようなステップが挙げられています。
-
Azure環境の整理: クラウド環境の運用、権限、構成を見直し、より効率的で安全なシステムを構築します。
-
データ基盤の設計・実装: ロボットが取得するログや画像といったデータを効率的に収集・管理するための基盤を設計し、実際に運用を開始します。
-
評価方法の設計: 収穫ロボットの実際の成果(収穫成功率など)とAIの精度を客観的に評価するための方法を確立します。
-
リアルデータを用いた精度向上: 実際の農作業現場で得られたデータを用いて、AIの入力設計、前処理、プロンプト(AIへの指示)の改善を行い、精度を向上させます。
これらの取り組みを段階的に進めることで、自動収穫ロボットの収穫成功率を向上させ、処理時間を短縮するフィジカルAIの社会実装を目指します。
AGRISTはこれまでも、Microsoft社との協働を通じて、農業現場で価値を生み出すAI活用に取り組んできました。今後もこの協力関係を強化し、AIと自動収穫ロボットを組み合わせたスマート農業の社会実装を強力に推進していく方針です。
AGRIST株式会社について
AGRIST株式会社は、テクノロジーの力で農業が抱える課題を解決し、100年先も持続可能な農業を実現することを目指すスタートアップ企業です。AIを搭載した自動収穫ロボットを全国の農場で展開し、スマート農業を推進しています。
本社は、国の地方創生優良事例にも選ばれた、農業が盛んな宮崎県新富町に位置しています。これまでに、農林水産大臣賞を含む国内外で27個以上の賞を受賞しており、その技術力と社会貢献性が高く評価されています。
AGRISTでは、AI農業プラットフォーム「AGRIST Ai」の構築を行うエンジニア、ロボット開発エンジニア、次世代農場の栽培および農業技術の研究開発を行う農場スタッフの採用を強化しています。
-
媒体資料: https://agrist.com/media
-
採用サイト: https://agrist.com/recruit

AGRISTの企業ロゴ
まとめ:AIとロボットが拓く、より豊かな農業の未来
AGRISTとMicrosoftによる今回のフィジカルAIの開発検証は、スマート農業の進化における重要なマイルストーンとなるでしょう。AIがロボットの「目」となり「頭脳」となることで、これまで人間の手作業に頼らざるを得なかった複雑な農作業が、より効率的かつ高精度に自動化される可能性が見えてきました。
「ヘタ隠れ」や「障害物」といった、一見すると小さな課題のように思えるものも、現場では大きな作業ロスにつながっていました。フィジカルAIは、このような現実世界の「困った」をAIの力で解決し、ロボットがより賢く、より柔軟に動けるようになるための道を切り開きます。これにより、農業従事者の負担が軽減され、生産性の向上、ひいては食料供給の安定化にも貢献することが期待されます。
今後、このフィジカルAIがさらに進化し、実際の農業現場で広く活用されることで、日本の、そして世界の農業が大きく変わっていくことでしょう。AIとロボットが織りなす、より豊かな農業の未来に注目が集まります。

