カメラのみで都市を走る自動運転AIの革新:Helm.ai Driverが示す未来と「データの壁」打破の鍵
自動運転技術は、私たちの移動手段を根本から変えようとしています。これまで、その実現には高精度な地図情報(HDマップ)やレーザーセンサー(ライダー)が不可欠だとされてきました。しかし、この常識を覆す画期的な技術が登場しました。
Helm.aiは、カメラからの情報のみで都市部を自律走行する「Helm.ai Driver」の主要な機能拡張を発表しました。このシステムは、高度なレベル2+の自動運転から、最終的には完全自動運転であるレベル4の都市型自動運転まで、スムーズに拡張できる量産対応のソフトウェアスタックです。

この技術は、従来の自動運転システムが抱えていた多くの課題、特に「データの壁」と呼ばれる問題に対する強力な解決策を提示しています。AI初心者の方にも理解しやすいように、Helm.ai Driverがなぜこれほどまでに革新的なのか、その核心技術と未来への可能性を詳しく見ていきましょう。
Helm.ai Driverの核心技術「Factored Embodied AI」とは?
Helm.ai Driverの最大の特長は、高精度なHDマップや高価なライダーセンサーに依存せず、カメラからの情報のみで複雑な都市の交通状況に対応できる点にあります。これを可能にするのが、独自の「Factored Embodied AI」アーキテクチャです。
では、「Factored Embodied AI」とは具体的にどのようなものでしょうか?
このアーキテクチャは、自動運転という複雑なタスクを、大きく分けて「パーセプション(認識)」と「ポリシー(行動計画)」という二つの明確で解釈可能なレイヤーに分割して解決します。
-
パーセプション(認識)レイヤー: このレイヤーでは、車両に搭載されたカメラから得られる生の映像データ(ピクセル情報)を、AIが「情報豊かなセマンティック・セグメンテーション」や「3D情報」といった、より理解しやすい形に変換します。
-
セマンティック・セグメンテーションとは、画像内の各ピクセルが何であるか(例:道路、歩行者、車、信号など)を分類する技術です。これにより、AIは周囲の環境を詳細に「認識」できます。
-
3D情報とは、カメラ画像から物体の奥行きや位置関係を推定する技術です。これにより、AIは道路上の他の車両や障害物がどこに、どのくらいの距離にあるかを正確に把握できます。
-
-
ポリシー(行動計画)レイヤー: このレイヤーは、上記の認識レイヤーで生成された「セマンティック・ジオメトリ」(認識された環境の構造や形状に関する情報)を入力として受け取ります。そして、この情報を基に、AIが「道路構造」や「交通ルール」を推論し、どのように運転すべきかという「行動計画」を立てます。例えば、交差点での右左折、信号機の遵守、他の道路利用者との相互作用など、人間のようなスムーズな運転操作を自律的に処理します。
このように、認識と行動計画を明確に分離することで、AIは周囲の状況を正確に理解し、それに基づいて安全かつ効率的な運転判断を下すことができます。この「Factored Embodied AI」は、自動運転システムの「ソフトウェアの脳」として機能し、車両が人間のように状況を判断し、行動することを可能にするのです。
自動運転レベル2+からレベル4へのスムーズな移行
自動運転技術には、その自律性の度合いに応じて「レベル」が設定されています。例えば、レベル2+は運転支援システムであり、運転者は常に監視が必要です。一方、レベル3は特定の条件下で「アイズオフ」(目を離せる)が許容され、レベル4は特定のエリア内で完全な自動運転が可能です。
Hem.ai Driverの大きな利点は、この自動運転レベルに依存しない設計がされていることです。つまり、自動車メーカーはまず、現在すぐに導入できる高度なレベル2+システムとしてHelm.ai Driverを採用できます。そして、将来的に車両のハードウェアや各国の規制が整った際には、同じソフトウェアアーキテクチャを使い続けることで、追加の開発コストや時間を大幅に削減しながら、認証済みのレベル3やレベル4の機能へと拡張できるのです。
このシームレスな移行パスは、自動車メーカーにとって非常に魅力的です。初期投資を抑えつつ、将来的な技術進化や市場のニーズに合わせて、より高度な自動運転機能を提供できる柔軟性をもたらします。Helm.ai Driverは、現在の運転支援から未来の完全自動運転までを支える、持続可能な基盤を提供すると言えるでしょう。
「データの壁」を打破する革新的なアプローチ
現在の自動運転業界は、「データの壁(Data Wall)」という大きな課題に直面しています。これは、自動運転システムが例外的な状況(エッジケース)で性能を向上させようとする際に、希少で高価な実世界のデータを指数関数的に大量に必要とする段階を指します。さらに、従来の「ピクセルから制御まで」を繋ぐエンド・ツー・エンドのAIモデルは、その内部処理が「ブラックボックス」となりがちで、厳格な安全性認証に必要な「解釈可能性」(AIがなぜそのように判断したのかを説明できること)を欠くという問題も抱えていました。
Helm.ai Driverが採用する「Factored Embodied AI」アーキテクチャは、この「データの壁」を同時に解決します。前述の通り、このアプローチは自動運転の課題を「パーセプション(認識)」と「ポリシー(行動計画)」の二つのレイヤーに分割します。
-
認識の個別解決: まず、認識レイヤーが生のセンサーデータを、情報豊かなセマンティック・セグメンテーションや3D情報といった、より「解釈可能な」データに変換します。これにより、AIは周囲の環境を人間が理解するような形で認識できるようになります。
-
ポリシーモデルの効率化: その後、Helm.aiのエンド・ツー・エンドのポリシーモデルは、生のピクセル情報ではなく、この解釈可能な「セマンティック・ジオメトリ」を入力として受け取ります。これにより、ポリシーモデルは道路構造や交通ルールをより効率的に「推論」できるようになります。
この要素分解されたアプローチは、インターネット規模のデータセットを活用した大規模な学習を可能にし、ポリシーモデルのデータ効率を劇的に高めます。つまり、従来よりもはるかに少ない実走行データで、高度な自動運転能力を習得できるようになるのです。これにより、「データの壁」の課題が大きく緩和されます。
さらに重要な点として、この構造は自動車メーカーにとって不可欠な「透明性」を提供します。認識と行動計画が分離されているため、各部分の動作を個別に検証・監査することが容易になります。これは、自動運転システムの安全性と信頼性を確保し、ISO 26262などの厳格な安全規格認証を目指す上で極めて重要です。この透明性があるからこそ、監視付きのレベル2+システムから、より高度なレベル3およびレベル4の展開へと安心して拡張できる、明確で監査可能なソフトウェア基盤が実現されるのです。
Helm.aiのCEO兼創設者であるVladislav Voroninski氏は、「業界は、力任せのデータ収集が高度な自動運転において商業的に成立しなくなる転換点に達している」と述べ、Helm.ai Driverがスケーラブルな自動運転のユニットエコノミクス(単位あたりの収益性)を根本から変える可能性を示唆しています。
驚異的な効率性:Deep Teaching™とセマンティック・シミュレーション
従来の自動運転開発では、複雑な市街地走行能力を実現するために、数十億ドルもの資本支出と数百万マイルにも及ぶ実走行データが必要となるのが一般的でした。しかし、Helm.ai Driverのプランナーは、わずか1,000時間の実走行データで、同等の成熟度に達したと報告されています。この驚異的な効率性を支えるのが、Helm.ai独自の二つの技術、「Deep Teaching™」と「セマンティック・シミュレーション」です。
-
Deep Teaching™(ディープティーチング): これは、Helm.ai独自の「教師なし学習」技術です。一般的なAI学習では、人間が高コストな作業でデータに「アノテーション」(ラベル付け)を行う必要があります。しかし、Deep Teaching™は、ニューラルネットワークが容易に入手可能な膨大な非走行データ(例:インターネット上の大量の画像や動画)から直接学習できるようにします。これにより、高コストな人間によるアノテーション作業を回避しつつ、AIの学習に必要なデータ量を大幅に確保できます。
-
セマンティック・シミュレーション: 通常の自動運転シミュレーションでは、現実世界を忠実に再現したフォトリアルな画像を生成するために、膨大な計算リソースが必要です。これに対し、セマンティック・シミュレーションでは、フォトリアルなピクセルを描画する計算負荷をかけずに、世界の「セマンティック・ジオメトリ」(環境の構造や意味に関する情報)で直接システムを訓練します。これにより、事実上無限の幾何学的シナリオで学習を行うことが可能になり、現実世界では稀なエッジケースも効率的に網羅できます。
これらの技術を組み合わせることで、Helm.aiは自動運転開発における従来のコストと時間の障壁を大きくバイパスしています。生のピクセルデータではなく、世界の「意味構造」でAIを訓練するという発想が、開発の効率性を桁違いに向上させているのです。
「ゼロショット」の優位性:地域を越えた汎用性
量産車向けの自動運転システムが真に実用的であるためには、手動での調整や特定のHDマップなしに、「未経験」の環境、つまり一度も走行したことのない地域でも問題なく対応できる能力が不可欠です。これを「ゼロショット」性能と呼びます。
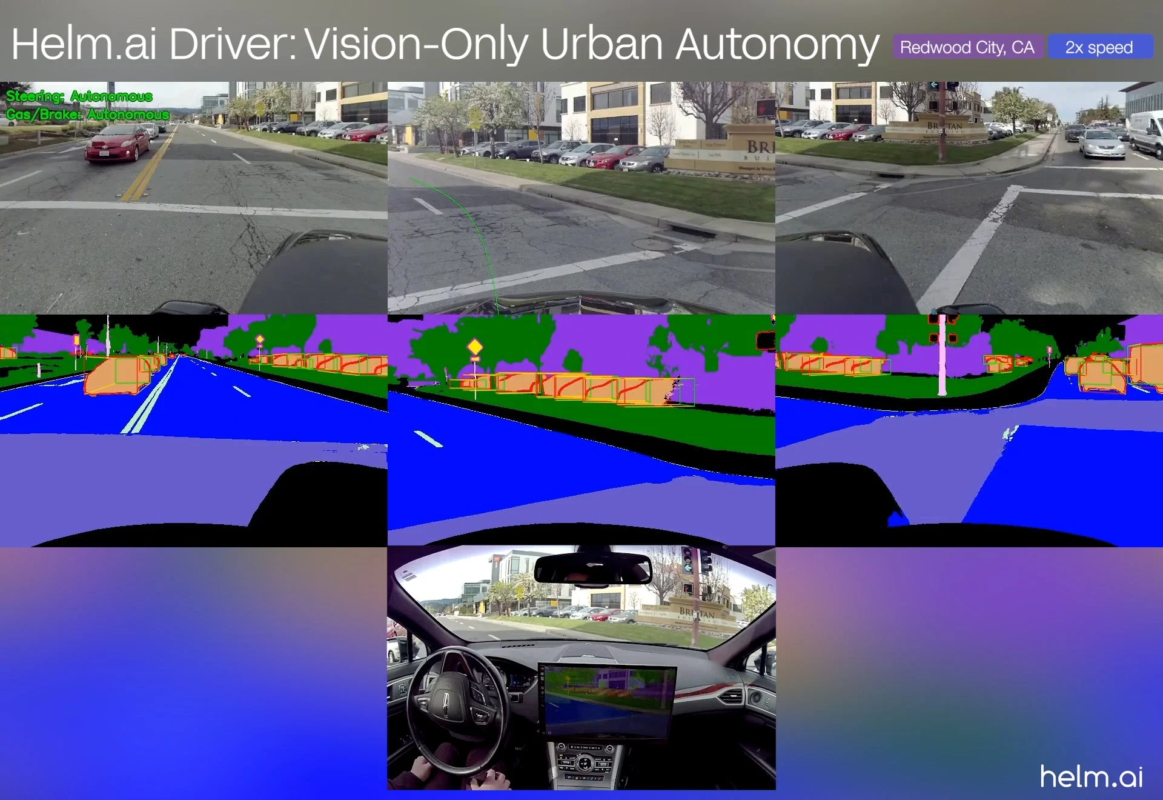
Helm.aiはこの汎用性を実証するため、最近、カリフォルニア州レッドウッドシティでのデモンストレーション動画を公開しました。この動画では、車両が交差点での右左折、複雑な信号機の遵守、他の道路利用者とのダイナミックな相互作用を自律的に処理する様子が収められています。これらはすべて、量産を目的とした自動運転システムの標準的なテストおよび検証プロトコルに従い、セーフティドライバーの監視下で安全に実施されました。
さらに、Helm.aiはカリフォルニア州トーランス(ロサンゼルス近郊)にソフトウェアを導入し、その地域の特定の道路に関する事前の学習を一切行わずに、「ゼロショット」での自律走行を実現したことを示しました。
この「ゼロショット」能力は、自動車メーカー(OEMパートナー)にとって計り知れないメリットをもたらします。通常、自動運転システムを新しい地域に展開する際には、その地域特有の道路状況や交通ルールに対応するために、膨大な量のデータ収集やシステム調整が必要となります。また、走行可能なエリアが限定される「ジオフェンス」の問題も発生します。
しかし、Helm.ai Driverの地域を越えた汎用能力があれば、OEMパートナーは、都市ごとの多大なデータ収集コストやジオフェンスによる走行エリア制限に悩まされることなく、レベル2+からレベル4の機能をグローバルに展開することが可能になります。これは、自動運転技術の普及を大きく加速させる可能性を秘めています。
詳細はこちらのリンクからご覧いただけます。
Helm.aiについて
Hem.aiは、ADAS(先進運転支援システム)、自動運転、およびロボティクス自動化向けのAIソフトウェアを開発している企業です。2016年に設立され、独自の「Deep Teaching™」とジェネレーティブAIを活用した車両搭載用のフルスタック運転ソフトウェアとシミュレーションツールを提供しています。同社は、量産を前提としたプログラムにおいて世界の自動車メーカーと提携し、次世代の自動運転技術の実現に貢献しています。
まとめ
Hem.ai Driverの発表は、自動運転技術の分野において、カメラのみで都市部を自律走行するという新たな可能性を提示しました。独自の「Factored Embodied AI」アーキテクチャは、自動運転開発が直面していた「データの壁」を打破し、AIの解釈可能性とデータ効率を飛躍的に向上させます。さらに、「Deep Teaching™」と「セマンティック・シミュレーション」による開発効率の向上、そして「ゼロショット」での地域を越えた汎用性は、自動運転システムのグローバル展開を現実的なものにするでしょう。
この技術は、現在のレベル2+の運転支援から、将来的なレベル3の「アイズオフ」自動運転、さらにはレベル4の完全自動運転へと、自動車メーカーがスムーズに移行できる道筋を示しています。Helm.ai Driverは、より安全で、より効率的、そしてよりアクセスしやすい自動運転の未来を築くための重要な一歩と言えるでしょう。今後のさらなる発展と、実社会への導入が期待されます。

