
AIロボットが人間の動きを学習!「UR AI Trainer」が工場に革命をもたらす
産業用ロボットの世界に新たな風を吹き込む画期的なシステムが発表されました。協働ロボットのパイオニアであるユニバーサルロボット(UR)と、AIモデルの学習を支える高品質データ提供のリーダーであるScale AIが共同で開発した模倣学習システム「UR AI Trainer」です。このシステムは、従来のロボットが決められたプログラム通りに動くのとは異なり、人間の動きを「見て、感じて、学ぶ」ことで、より柔軟で高度な作業をロボットに実行させることを目指しています。2026年3月16日、米カリフォルニア州サンノゼで開催されたGTC 2026で発表されたこのソリューションは、「ラボでの検証から工場での実運用までを直接つなぐ」業界初のシステムとして、大きな注目を集めています。
「UR AI Trainer」とは?人間の動きを模倣するAIロボットの学習システム
「UR AI Trainer」は、AIロボットが人間の動作を効率的に学習するためのシステムです。その核心には、「模倣学習」という考え方があります。模倣学習とは、人間が手本となる動きをすることで、ロボットがその動きを真似て習得する学習方法です。これにより、複雑な作業でもロボットに簡単に教え込むことが可能になります。
このシステムでは、ロボットが人間の動きを学習するために、以下の3種類の「マルチモーダルデータ」と呼ばれる高品質な情報を活用します。
- 視覚データ: ロボットのカメラが捉える映像情報。人間が何を見て、どのように対象物を認識しているかを学習します。
- 動作データ: 人間の腕や手の動きの軌跡、速さ、方向などの情報。ロボットがどのように動くべきかを直接的に学習します。
- 力覚データ: 人間が対象物にどれくらいの力を加えているか、どのように接触しているかという情報。ロボットが繊細な作業を行う上で非常に重要になります。
これらのデータは、トレーニングセルと呼ばれる専用の環境で、人間が「リーダー」ロボットを操作し、それを見て「フォロワー」ロボットがリアルタイムで動きを再現する過程で収集されます。この収集されたデータをもとに、ロボットの「脳」となる基盤モデルが現場の作業に適応するようにトレーニングされるのです。従来のロボットがプログラムされた経路を正確にたどるだけだったのに対し、UR AI Trainerを導入したロボットは、まるで人間のように状況を判断し、柔軟に対応できるようになることが期待されます。
なぜ今、「UR AI Trainer」が必要なのか?従来のAIロボット学習の課題と解決策
AIロボットの導入は、製造業における人手不足の解消や生産性向上に貢献すると期待されています。しかし、これまでのAIロボットの学習にはいくつかの大きな課題がありました。
従来の課題
-
ハードウェアの分断: 多くのAIロボットの学習データは、実際の生産現場で使われる産業用ロボットではなく、研究室用のロボットで取得されていました。そのため、研究で得られた成果をそのまま工場に持ち込もうとしても、ロボットの性能や特性の違いから、期待通りの動作ができないことが頻繁に発生していました。
-
データ品質の低さ: 従来の学習データは、視覚情報に偏りがちでした。しかし、工場での作業には、部品の微妙な感触を掴んだり、組み立て時に適切な力を加えたりするなど、目に見えない「力」の感覚が非常に重要になります。視覚情報だけでは、このような繊細な作業や対象物との接触を伴う作業をロボットに正確に再現させることは困難でした。
「UR AI Trainer」が解決する課題
ユニバーサルロボットのAIロボティクス製品担当バイスプレジデントであるAnders Beck氏は、「お客様はもはや単なる“AI機能”では満足していません。実際に導入するロボットと同じ環境で、高精度かつ同期されたロボットとビジョンデータを収集し、AIモデルを学習させる手段を求めています。」と述べています。「UR AI Trainer」は、これらの課題に直接的に対応し、以下の革新的な技術で「ラボから工場へ」のギャップを解消します。
-
UR独自のダイレクトトルク制御と力覚フィードバック: URの協働ロボットは、独自の「ダイレクトトルク制御」技術と「力覚フィードバック」機能を備えています。ダイレクトトルク制御とは、ロボットの関節にかかるトルク(回転力)を直接制御する技術で、これによりロボットは非常に敏感に外部からの力を感じ取ることができます。力覚フィードバックは、この感じ取った力を元に、ロボットがどのように対象物と相互作用しているかを開発者がリアルタイムで把握し、細かく制御することを可能にします。
これにより、ロボットが対象物を「優しく掴む」「適切な力で押し込む」といった、人間が日常的に行っているような繊細な作業を学習できるようになります。例えば、傷つきやすい部品を扱う作業や、はめ込みが難しい部品の組み立てなど、これまでは難しかった作業もAIロボットが担えるようになるでしょう。
-
実績あるハードウェアでのデータ取得: ユニバーサルロボットは、世界中で10万台以上の協働ロボットを導入している実績があります。UR AI Trainerは、この実績あるハードウェアをそのままAI学習に活用できるため、研究室の特殊な環境ではなく、実際の工場で使われるロボットと同じ環境で高品質なデータを取得できます。これにより、学習したAIモデルが実際の生産現場で高い精度を発揮することが可能になります。
Scale AIとの強力な連携でロボットデータ活用を加速
「UR AI Trainer」の実現には、AIモデルの学習に不可欠な高品質なデータを提供するScale AIとの連携が欠かせません。
-
大規模かつ継続的なデータ収集: UR AI Trainerは、UR AI Acceleratorプラットフォーム上で動作し、Scale AIのソフトウェアと統合されています。これにより、生産現場のロボットから大規模なマルチモーダルデータを継続的に収集し、AIモデルの改善を加速させる「フィードバックループ」を構築します。フィードバックループとは、モデルが実際に使われた結果をもとに、さらにモデルを改善していくサイクルのことです。これにより、AIモデルは常に最新の状況に適応し、性能を向上させ続けることができます。
-
Vision-Language-Action(VLA)モデルの学習: 収集された動作、力、画像といったマルチモーダルデータは、Scale AIの技術によって構造化され、Vision-Language-Action(VLA)モデルの学習に活用されます。VLAモデルは、画像(Vision)や言語(Language)の情報を理解し、それに基づいてロボットが適切な行動(Action)を取ることを可能にする、次世代のAIモデルです。これにより、ロボットは単に動きを真似るだけでなく、人間の指示を理解し、より複雑なタスクを自律的に実行できるようになるでしょう。
Scale AIのPhysical AI部門ゼネラルマネージャーであるBen Levin氏は、「ユニバーサルロボットは産業用ロボット分野におけるリーダーであり、そのグローバルな導入基盤はデータ収集とAI展開の理想的な基盤です。今回の協業により、AIモデルの学習・導入・改善を高速に回す統合的なデータ基盤を実現しました。」と述べています。また、両社は協業の一環として、URロボットで収集した大規模な産業用データセットを年内に公開する予定であり、これによりAIロボットの研究開発がさらに加速することが期待されます。
「ラボから工場へ」のギャップを埋める実証:GTCでの実機体験とデータ再現
GTC 2026の会場では、「UR AI Trainer」の具体的な機能と可能性を示すために、複数のデモンストレーションが行われました。
実機による模倣学習体験
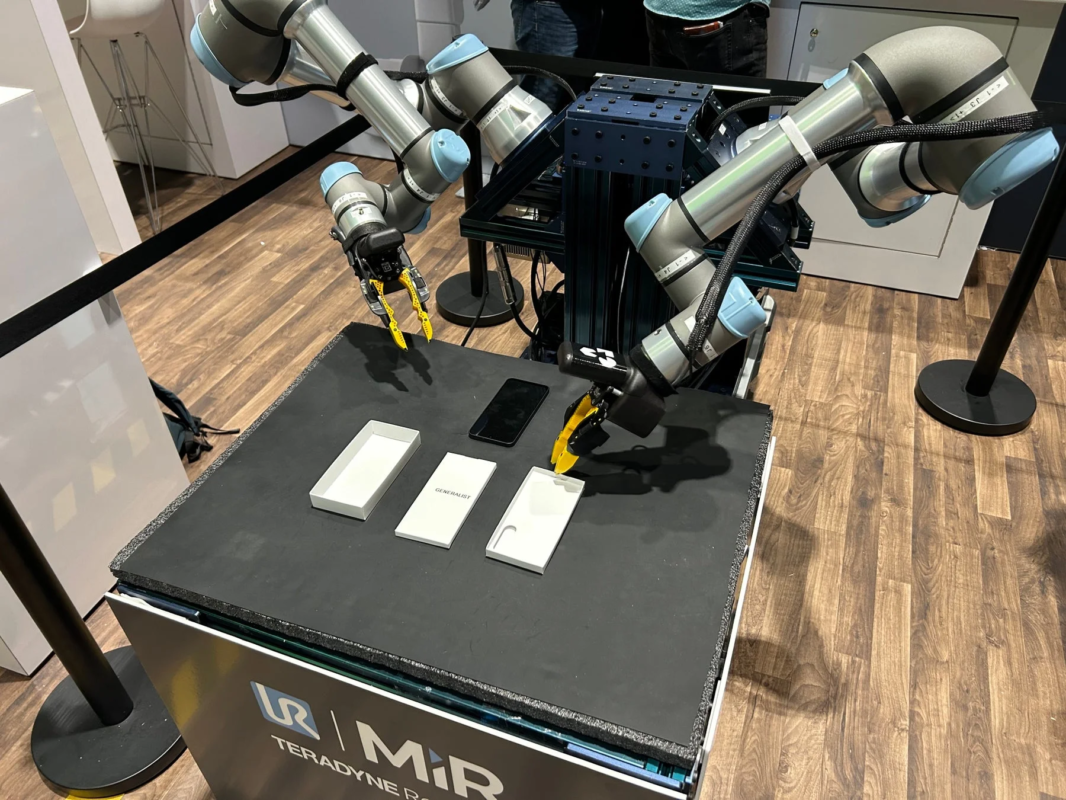
来場者はURブースで、2台のUR3e協働ロボットを「リーダー」として操作し、触覚フィードバックを入力として2台のUR7e「フォロワー」ロボットを制御する体験ができました。このデモンストレーションでは、スマートフォンのパッケージング作業を実行しながら、模倣学習およびVLA学習用のデータ取得プロセスを体験することができました。取得されたデータは、Scale AIのプラットフォーム上にリアルタイムで記録され、そのままAI Trainer上で再生(リプレイ)することも可能でした。これにより、参加者はロボットが人間の動きをどのように学習し、再現するのかを肌で感じることができたでしょう。

仮想環境でのシミュレーション
AIモデルのトレーニングデータ取得プロセスは、NVIDIA OmniverseおよびIsaac Sim上に構築された仮想環境でも紹介されました。ここでは、2台のHaply Inverse3デバイスを用いて双腕のUR3eシステムを操作し、物理挙動を忠実に再現したシミュレーションを体験できました。これにより、実際のロボットを動かすことなく、安全かつ効率的に多様なシナリオでデータを生成し、AIモデルを学習させることが可能になります。

ユニバーサルロボットは、NVIDIAの「Physical AI Data Factory Blueprint」の活用も検討しており、合成データ生成の自動化とスケーリングを進めることで、大規模な計算資源を高品質なロボット学習データの生成基盤へと転換することを目指しています。NVIDIAのロボティクスおよびエッジAIエコシステム責任者であるAmit Goel氏は、「Physical AIへの移行には、固定的なプログラム型自動化から、人のように認識・判断・学習できるロボットへの転換が不可欠です。ユニバーサルロボットはNVIDIA Isaacのシミュレーション基盤を活用し、高精度なデータ取得と生成を可能にするスケーラブルな基盤を構築しています。」とコメントしています。
Generalist AIによる実環境での性能実証
さらに、URの優先モデルパートナーであるGeneralist AIによる最先端のロボット基盤モデルの実演も行われました。このデモでは、2台のUR7eロボットがスマートフォンのパッケージング作業を自律的に実行し、高い器用さ、協調動作、そして接触を伴う操作能力を実環境で示しました。これは、大規模で高品質なトレーニングデータと最先端のモデルアーキテクチャを組み合わせることで、研究室の環境を超えて、実際の工場で動作可能な「Physical AI」が実現できることを明確に示したものです。
Generalist AIの共同創業者兼CEOであるPete Florence氏は、「ユニバーサルロボットの信頼性の高い産業用プラットフォーム上での今回のデモは、物理世界における常識的な判断を、実際の作業能力へと変換できることを示しています。これにより、さまざまな産業での展開が可能になります。」と述べており、Physical AIが産業界に与えるインパクトの大きさがうかがえます。
Physical AIの未来を切り開く「UR AI Trainer」
「UR AI Trainer」は、従来の「プログラムされた通りに動くロボット」から「自ら学習し、判断して動くロボット」への大きな転換点を示すものです。特に、人間の繊細な動作や力加減をロボットが習得できるようになることは、これまで自動化が難しかった多くの作業領域にロボットを導入する可能性を広げます。これにより、製造業における生産性の劇的な向上や、人手不足問題の解決に大きく貢献することが期待されます。
ユニバーサルロボットのAnders Beck氏が「AIモデル学習およびデータ取得の先進的な企業に当社の技術が採用されていることは、ユニバーサルロボットがPhysical AI分野におけるプラットフォームとして選ばれている理由を示しています。」と語るように、UR AI TrainerはPhysical AI分野における標準的なソリューションとなる可能性を秘めています。
まとめ:工場自動化の未来を拓く「UR AI Trainer」
ユニバーサルロボットとScale AIが発表した「UR AI Trainer」は、AIロボットの学習方法に革命をもたらす画期的なシステムです。高品質なマルチモーダルデータを活用した模倣学習と、UR独自のダイレクトトルク制御、Scale AIのデータ活用技術が融合することで、AIモデルの学習が飛躍的に加速し、ラボで開発された技術をスムーズに工場へ導入できるようになります。
このシステムによって、ロボットは人間のように繊細な作業や複雑なタスクをこなせるようになり、これまで自動化が困難だった分野にもAIロボットの活用が広がるでしょう。GTCでの実演が示すように、Physical AIはすでに実用段階に入りつつあり、製造業をはじめとする様々な産業において、効率化、生産性向上、そして人手不足解消の強力な推進力となることが期待されます。
「UR AI Trainer」は、産業用ロボットが人間のパートナーとして、より高度な役割を担う未来を創造する重要な一歩となるでしょう。今後の進展に注目が集まります。
関連リンク
-
ユニバーサルロボット: http://www.universal-robots.com/ja/
-
UR AI Trainer詳細: https://www.universal-robots.com/ja/2026/ur-ai-trainer/
-
Generalist AI: https://generalistai.com/
-
ユニバーサルロボットのダイレクトトルク制御ブログ: https://www.universal-robots.com/ja/blog/unlock-low-level-force-control-with-universal-robots-direct-torque-control/
-
UR AI Accelerator: https://www.universal-robots.com/ja/products/ai-accelerator/
-
NVIDIA Omniverse: https://developer.nvidia.com/omniverse
-
NVIDIA Isaac Sim: https://developer.nvidia.com/isaac/sim
-
Haply Inverse3: https://www.haply.co/inverse3/
-
Scale AI: https://www.scale.com

