自動運転の未来を拓く「データの壁」突破:Helm.aiがデータ効率AIで新境地を開く
自動運転技術は、私たちの生活を大きく変える可能性を秘めていますが、その実現にはまだ多くの課題があります。中でも、AI(人工知能)を訓練するために必要となる膨大なデータは、業界全体の大きな障壁となっていました。この「データの壁」と呼ばれる課題に対し、AIソフトウェアのリーダーであるHelm.aiが、革新的な解決策を発表しました。彼らが開発した新しいアーキテクチャ「Factored Embodied AI(因数分解された具現化AI)」は、従来とは桁違いに少ないデータ量で、複雑な都市環境における自動ハンドル操作を可能にするというものです。
この記事では、自動運転の現状と「データの壁」がなぜ問題なのか、そしてHelm.aiの「Factored Embodied AI」がどのようにこの課題を乗り越え、自動運転の未来を切り拓くのかを、AI初心者にも分かりやすい言葉で詳しく解説していきます。
自動運転開発を阻む「データの壁」とは?
現在、自動運転業界では、車両が運転の物理法則を一から学習するために、ペタバイト級(1ペタバイトは1000テラバイト、途方もない量です)もの膨大なデータを必要とする「エンドツーエンド(End-to-End)」と呼ばれるAIモデルの開発競争が繰り広げられています。この「エンドツーエンド」モデルは、カメラ映像などの入力データから直接、車両の操作(アクセル、ブレーキ、ハンドルなど)を出力する、いわば「ブラックボックス」のような働きをします。
しかし、このアプローチにはいくつかの大きな課題があります。
-
データ収集コストの高騰: 必要なデータ量が膨大であるため、その収集には莫大な時間と費用がかかります。特殊な車両で世界中の道路を走行し、あらゆる状況(晴れ、雨、雪、昼、夜、交通量の多い場所、少ない場所など)のデータを集める必要があります。
-
収穫逓減(しゅうかくていげん): モデルの性能が向上するにつれて、さらに性能を改善するために必要なデータは、指数関数的に希少になり、収集コストもさらに高騰します。例えるなら、最初の一歩は簡単でも、最後の1%の改善にはそれまでの何倍もの労力がかかるようなものです。
-
モデルの複雑性: ブラックボックスであるため、AIがなぜそのような判断を下したのかを人間が理解しにくいという問題もあります。これは、安全性や信頼性の確保において重要な課題となります。
これらの課題が、自動運転技術の普及と実用化を停滞させている「データの壁」の正体です。この壁を越えなければ、自動運転は一部の限定された環境でしか機能しない可能性が高いのです。
Helm.aiが提示する解決策:Factored Embodied AIの革新
Helm.aiは、この「データの壁」を打ち破るために、まったく新しいアプローチである「Factored Embodied AI」を開発しました。このフレームワークの核心は、「運転タスクを因数分解する」という考え方にあります。これは、複雑な問題をより小さな、管理しやすい部分に分割して解決しようとするアプローチです。
従来の「エンドツーエンド」モデルが、ノイズの多い(つまり、情報が多すぎる)ピクセルデータから直接、運転の物理法則を学ぼうとするのに対し、Helm.aiの「Factored Embodied AI」は、まず「Geometric Reasoning Engine(幾何学的推論エンジン)」という独自の技術を使って、世界のクリーンな3D構造を抽出します。これは、カメラ映像から道路の形状、他の車両や歩行者の位置、距離などを正確に把握することを意味します。
例えるなら、人間が運転を学ぶ際に、まず道路標識や車線、他の車の動きといった「運転に必要な情報」を認識し、その上でどのようにハンドルを操作するかを考えるのと同じです。Helm.aiのAIは、この「運転に必要な情報」を効率的に抽出し、それに基づいて車両の意思決定ロジックをシミュレーション内で効率的にトレーニングすることを可能にします。
これにより、まるで人間のティーンエイジャーが数年ではなく数週間で運転を覚えるかのように、かつてない効率でAIを訓練できるようになるのです。
驚異のデータ効率!わずか1,000時間で実現する自動操舵
Helm.aiが今回公開したベンチマークデモでは、そのデータ効率の高さが明確に示されました。

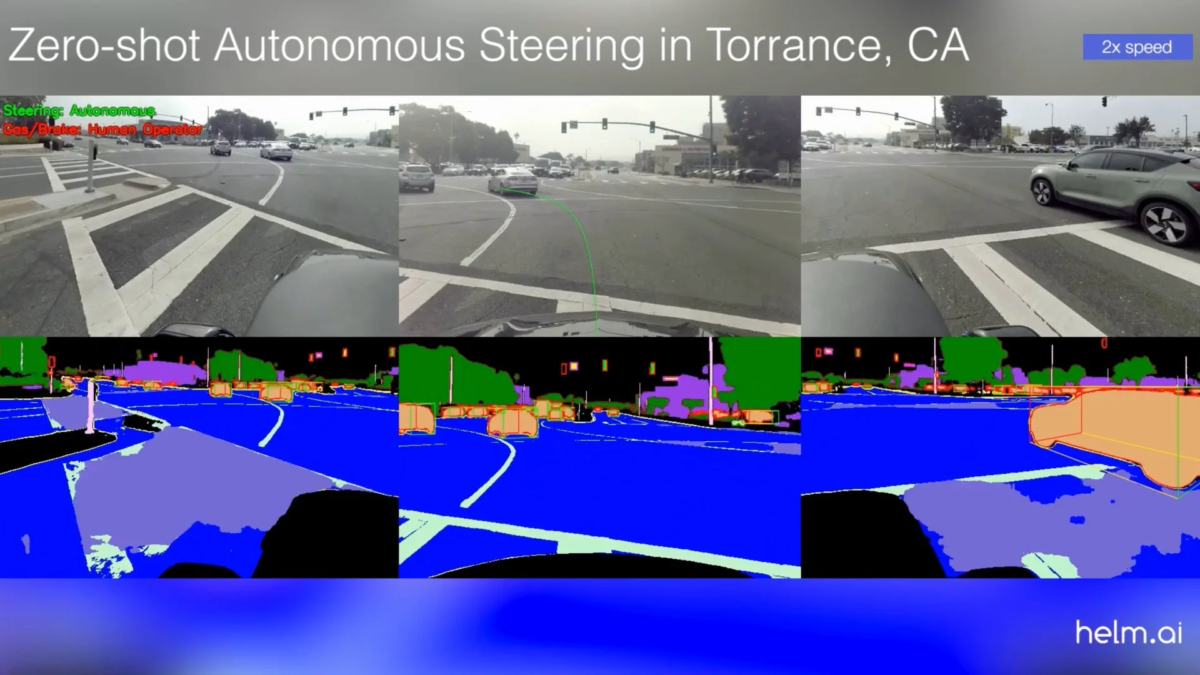
同社は、ビジョン(カメラ映像)のみを使用するAIドライバーが、カリフォルニア州トーランスの複雑な街路を「ゼロショット」で走行するデモを披露しました。「ゼロショット」とは、そのAIドライバーが特定の道路を一度も走行したことがないにもかかわらず、自動で運転できる能力を指します。このデモでは、AIドライバーが車線維持、車線変更、そして都市部の交差点での右左折に成功し、操舵介入なしで20分間連続走行する実力を示しました。
この驚くべき自動操舵機能は、シミュレーションとわずか1,000時間の実走行データのみを使用してAIをトレーニングすることで達成されました。これは、従来のモノリシックな「エンドツーエンド」アプローチが必要とするデータ量のほんの一部に過ぎません。膨大なデータ収集に苦労していた業界にとって、この「1,000時間のベンチマーク」は、自動運転開発における大きなブレークスルーとなるでしょう。
このゼロショットの実力は、以下の動画で確認できます。
Factored Embodied AIを支える4つの主要技術
Helm.aiの新しいアーキテクチャは、以下の主要な技術的進歩を通じて、業界の効率性の壁を打ち破っています。
1. シミュレーターのギャップを埋める:意味空間でのトレーニング
従来の自動運転モデルは、シミュレーションでトレーニングした結果を実世界に適用する際に、「シミュレーターのギャップ」と呼ばれる問題に直面していました。これは、シミュレーション環境と実世界との視覚的な差異が大きいため、シミュレーションで学んだことが実世界でうまく機能しないという課題です。
Helm.aiのアーキテクチャは、この問題を解決するために「意味空間(Semantic Space)」でトレーニングを行います。これは、リアルなグラフィックスではなく、幾何学(物体の形や位置関係)とロジック(論理的な判断)に焦点を当てた、世界を簡略化したビューです。ピクセル(画像の色情報)ではなく、道路の構造や物体の3D形状をシミュレートすることで、無限のシミュレーションデータでトレーニングを行い、その学習結果を即座に実世界で機能させることが可能になります。これにより、シミュレーションと実世界との間の隔たりが大幅に縮小されます。
2. 1,000時間のベンチマーク:堅牢な都市部自動ハンドル操作
前述の通り、この幾何学的シミュレーションを最大限に活用することで、Helm.aiのプランナーは、わずか1,000時間の実走行ファインチューニングデータ(最終調整のためのデータ)のみを使用して、堅牢なゼロショットの都市部自動ハンドル操作を実現しました。このデータ効率の高さは、完全自動運転への道を、より資本効率の高い(つまり、少ない投資で実現できる)ものにすると期待されます。
3. 行動モデリング:複雑な交通状況を予測
自動運転車が安全に走行するためには、自車の動きだけでなく、周囲の歩行者や他の車両の動きを予測し、適切に対応する必要があります。加速、減速、そして複雑な相互作用に対処するため、Helm.aiはその「ワールドモデル(World Model)」機能を活用して、歩行者や他の車両の意図を予測します。これにより、密集した交通状況下でも安全なナビゲーションが可能になります。例えば、交差点で右折しようとしている車が、対向車線の車が減速するかどうかを予測し、安全なタイミングで曲がる判断をする、といった高度な状況判断が可能になります。
4. ユニバーサルな認識能力:道路以外の環境にも適応
この技術の認識レイヤー(車両が周囲の環境を認識する部分)の堅牢性を検証するため、Helm.aiはその車載ソフトウェアを露天掘り鉱山(Open-Pit Mine)という、通常の道路とは全く異なる環境に導入しました。その結果、極めて高いデータ効率で、システムが走行可能な路面と障害物を正確に特定できることが証明されました。このことは、Helm.aiのアーキテクチャが、道路だけでなく、あらゆる種類のロボット環境(例えば、倉庫内の自律移動ロボットや建設現場の重機など)に適応できる可能性を示しています。つまり、汎用性の高いAIであるということです。
自動車メーカーにもたらす戦略的優位性
この新しいアーキテクチャは、自動車メーカーに重要な戦略的優位性をもたらします。現在、多くの競合他社は、自動運転AIのトレーニングデータの収集に、既存の大規模なフリート(車両群)に依存しています。つまり、すでに多くの車を販売し、そこからデータを集められる大企業が有利な状況です。
しかし、Helm.aiのアプローチは、自動車メーカーが既存の開発用フリート(試験車両など、比較的小規模な車両群)を使用して、ADAS(先進運転支援システム)からレベル4の自動運転機能(特定の条件下で完全に自動運転)までを展開できることを可能にします。これにより、自動運転開発における参入障壁となっていた莫大なデータ要件を回避できるため、より多くの自動車メーカーがこの分野に参入しやすくなるでしょう。
Helm.aiのCEO兼創設者であるVladislav Voroninski氏は、「私たちは、力ずくのデータ収集の時代から『データ効率』の時代へと移行しています。LAの高速道路であれ、鉱山の運搬路であれ、幾何学(ジオメトリ)の法則は一定です。当社のアーキテクチャはこの普遍的な幾何学を一度解決することで、あらゆる場所への自動運転の展開を可能にします」と述べています。これは、場所や環境が変わっても、物体の形や位置関係といった基本的な幾何学的法則は変わらないため、一度その法則をAIに学習させれば、様々な環境に応用できるという考え方です。
Helm.aiについて
Helm.aiは、L2/L3 ADAS(先進運転支援システム)、L4自動運転、およびロボット工学自動化向けのAIソフトウェアを開発している企業です。2016年に設立され、Deep Teaching™と生成AI(Generative AI)といった最先端技術を活用し、実車展開向けのフルスタック運転ソフトウェア(自動運転に必要な全てのソフトウェア)およびシミュレーションツールを提供しています。同社は、量産プログラムにおいて世界的な自動車メーカーと提携しており、その技術力は高く評価されています。
まとめ:自動運転の未来を切り拓くデータ効率AI
Helm.aiが発表した「Factored Embodied AI」は、自動運転業界が長年直面してきた「データの壁」を打ち破る画期的な技術です。従来の膨大なデータ収集に依存するアプローチから脱却し、わずか1,000時間のデータで複雑な都市環境でのゼロショット自動操舵を実現したことは、自動運転開発の効率と実用化の可能性を大きく広げるものです。
「意味空間」でのトレーニング、1,000時間のベンチマーク、行動モデリング、そしてユニバーサルな認識能力といった主要な技術的進歩は、自動運転車がより安全に、より多様な環境で機能するための基盤を築きます。これにより、自動車メーカーはデータ収集の負担を軽減し、より迅速に高度な自動運転機能を市場に投入できるようになるでしょう。
Helm.aiのこの革新的なアプローチは、「データ効率」という新たな視点から自動運転の未来を切り拓き、私たちの生活に自動運転がもたらす恩恵を、より早く、より広く普及させる可能性を秘めています。今後のさらなる発展に注目が集まります。

